





병렬 로봇의 기술적 혁신: 회전 장치
다양한 산업 분야에서 병렬 로봇이 널리 인식되면서 최근 몇 년 동안 생산 라인에 산업용 로봇을 적용하는 기업이 점점 더 많아지고 있습니다. 그들이 다루는 산업 영역과 생산 라인 프로세스도 원래의 상대적으로 집중된 자동차, 식품, 의약품, 용접 등에서 점차 더 많은 범주로 확장되었습니다. 따라서 병렬 로봇 본체의 성능은 더욱 다양한 프로세스 요구 사항으로 인해 어려움을 겪습니다. 중요한 산업용 로봇 메커니즘으로서 병렬 로봇은 작은 동작 관성, 작은 바닥 면적, 작은 누적 오류, 높은 제어 정확도 및 빠른 속도와 같은 많은 장점을 가지고 있습니다. 생산 능력 향상 요구 사항, 처리 정확도 요구 사항 및 위생 조건 측면에서 더욱 엄격한 식품, 의약품, 3C 전자 및 인쇄와 같은 산업에서 병렬 로봇은 신속한 포장, 분류 및 운송을 위한 최선의 선택이 되었습니다.
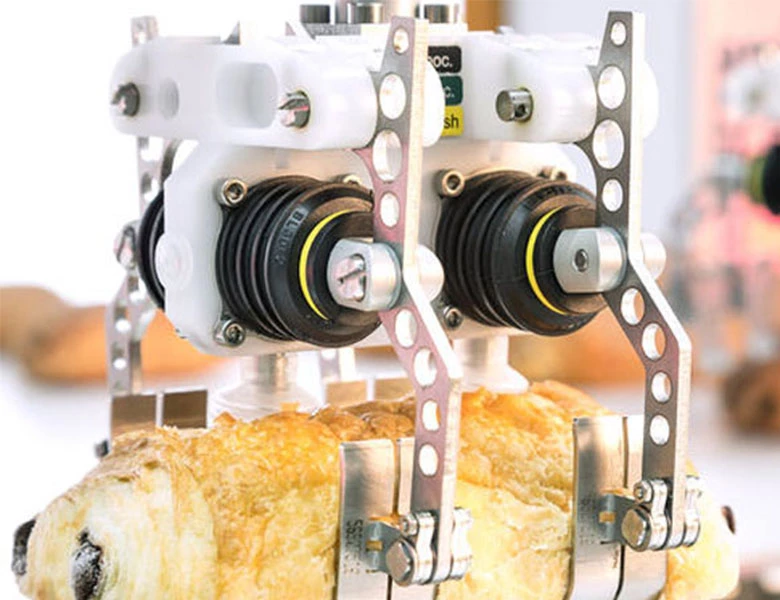
병렬 로봇의 기계 구조는 정적 플랫폼, 구동 암, 구동 암, 이동 플랫폼 및 중간 샤프트로 구성됩니다. 그 중 이동플랫폼은 (이동식 디스크라고도 함)병렬 로봇의 중요한 부분인 는 병렬 로봇이 운동 궤적을 구현하기 위한 직접 출력 메커니즘입니다. 모바일 플랫폼이 도달할 수 있는 공간 범위는 터미널 픽 앤 플레이스 프로세스 중 경로 범위, 심지어 들어오는 자재 속도와 컨베이어 벨트 작동 속도에도 직접적인 영향을 미칩니다. 중간축 끝단의 디자인은 고정판과 회전판을 연결하는 기구 역할을 할 뿐만 아니라 회전 과정에서 각도와 정밀도에 직접적인 영향을 미칩니다. 즉, 병렬 로봇이 특정 분류 및 자재 분류 프로세스를 완료할 때 모바일 플랫폼의 활동 공간이 클수록 로봇은 더 넓은 범위에서 자재를 집고 배치할 수 있습니다. 들어오는 자재가 다양한 위치에 있는 경우 중간 샤프트의 회전이 높기 때문에 컨베이어 벨트의 품목을 회전하고 집어서 높은 곳에 배치하는 것이 더 유연해집니다.-속도 작동. 간단히 말해서, 구조의 안정성과 유연성은 최종 동작의 정확성과 로봇이 달성할 수 있는 기능을 직접적으로 결정합니다. 실제 시장 응용 분야에서는 평행 로봇의 중요한 문제인 큰 끝 회전 각도에 대한 고객 요구 사항에 자주 직면합니다. 공압 장치를 설치한 후 이동식 디스크가 공기 파이프에 의해 제한되기 때문에 회전 중에 공기 파이프가 얽히고 회전으로 인해 공기 파이프 인터페이스가 헐거워지고 떨어지게 됩니다. 높은 왕복 과정에서-속도 선택, 배치 및 회전 시 병렬 로봇의 이동식 디스크는 공기 파이프의 감기, 풀림 및 낙하를 더욱 악화시킵니다. 뿐만 아니라 이러한 문제도 동시에 존재하며 공기관 마모가 더욱 심각합니다. 이동식 디스크의 유연한 끝 동작을 구현하는 과정에서 일련의 불가피한 문제가 자주 발생합니다. 실제 생산에서는 이동식 디스크의 회전 각도에 대한 제약이 될 뿐만 아니라 병렬 로봇 사용을 선택할 때 고객의 관심사가 됩니다. 회전 가능한 가스 경로가 있는 이동식 디스크인 밀폐형 가스 슬립 링은 2017년에 개발되었으며, 이는 가스 경로의 견고성을 보장하면서 이동식 디스크의 모든 회전 각도를 실현합니다.
동봉된 에어 슬립 링은 공기 경로를 회전 가능한 이동식 디스크에 통합합니다. 이동식 디스크와 하향 회전 턴테이블의 구조적 변형을 통해 공기 경로가 폐쇄형 공압 장치에 통합됩니다. 중간축의 공기 통로는 고정 디스크의 공기 흡입구로 들어가고, 가동 디스크와 하부 회전 디스크 사이의 밀폐된 공간을 통과하여 하부 회전 디스크의 공기 배출구로 전달됩니다. 동시에 밀폐공간의 상단과 하단은 O로 밀봉된다.-모양의 밀봉 링으로 공기 경로의 연결을 실현하여 기존 이동식 디스크에 공압 장치를 설치할 때 공기 파이프에 의해 회전 각도가 제한되는 문제를 해결하고 공기 파이프 와인딩이 큰 회전 각도에 미치는 영향을 줄입니다. 이동식 디스크의 유연성을 높이고 이동식 디스크의 유연성을 높입니다. 산업 생산이 계속해서 지능화됨에 따라 병렬 로봇은 높은 성능으로 인해 산업용 로봇 개발에 없어서는 안될 중요한 역할이 될 것이라고 굳게 믿습니다.-속도, 높음-정밀도, 유연한 공정 특성.
이전의: 더 이상은 안돼
