





Avance tecnológico en robots paralelos: dispositivos giratorios
Con el reconocimiento generalizado de los robots paralelos en diversas industrias, en los últimos años, cada vez más empresas han comenzado a aumentar la aplicación de robots industriales en las líneas de producción. Las áreas industriales y los procesos de la línea de producción que cubren también se han desplazado de los automóviles, alimentos, productos farmacéuticos, soldadura, etc., relativamente concentrados originalmente, y se han extendido gradualmente a más categorías. Por lo tanto, el rendimiento del cuerpo del robot paralelo se ve desafiado por requisitos de proceso más diversos. Como importante mecanismo de robot industrial, los robots paralelos tienen muchas ventajas, como pequeña inercia de movimiento, pequeña superficie de suelo, pequeño error acumulativo, alta precisión de control y alta velocidad. En industrias como la alimentaria, la medicina, la electrónica 3C y la impresión, que son más estrictas en términos de requisitos de mejora de la capacidad de producción, requisitos de precisión de procesamiento y condiciones sanitarias, los robots paralelos se han convertido en la mejor opción para el envasado, clasificación y transferencia rápidos.
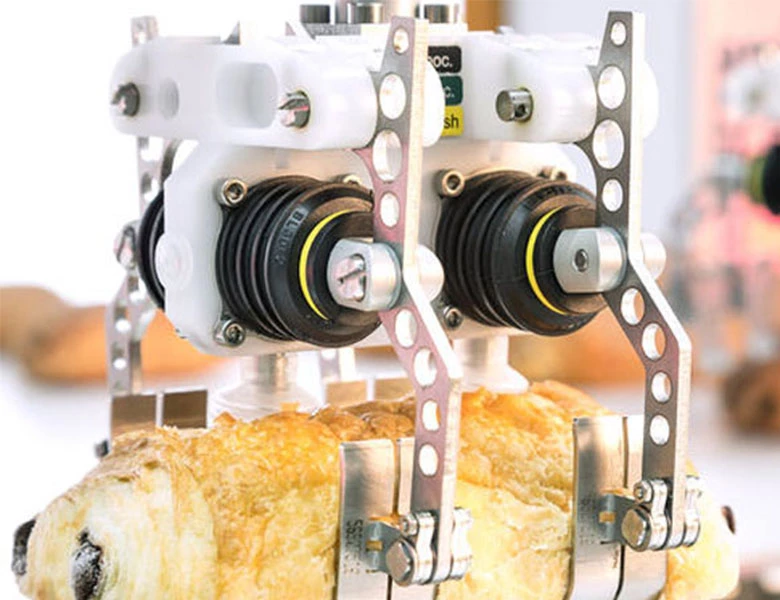
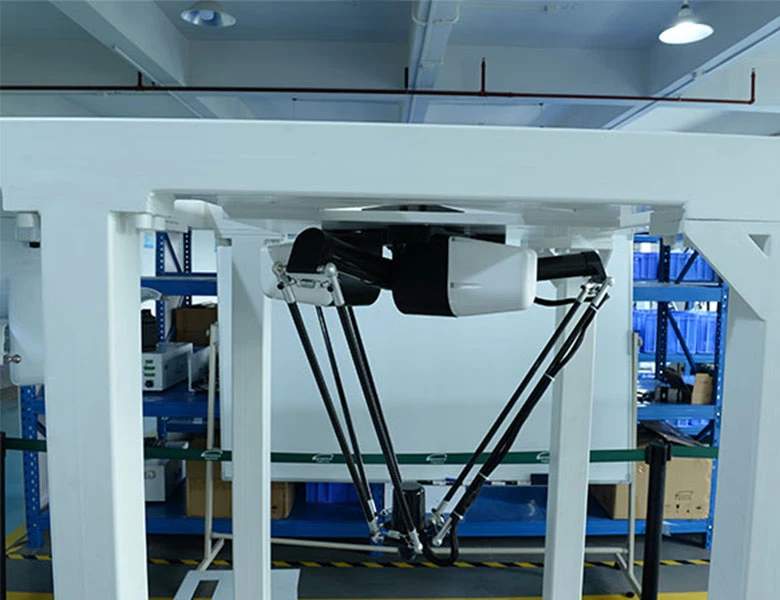
La estructura mecánica del robot paralelo consta de una plataforma estática, un brazo impulsor, un brazo conducido, una plataforma móvil y un eje intermedio. Entre ellos, la plataforma móvil. (También llamado disco móvil.), que es una parte importante del robot paralelo, es el mecanismo de salida directa para que el robot paralelo realice la trayectoria del movimiento. El rango espacial que puede alcanzar la plataforma móvil afecta directamente el recorrido durante el proceso de recogida y colocación de la terminal, incluso la velocidad del material entrante y la velocidad de funcionamiento de la cinta transportadora. El diseño al final del eje intermediono sólo sirve como mecanismo que conecta la placa fija y la placa giratoria, sino que también afecta directamente el ángulo y la precisión durante el proceso de rotación. Es decir, cuando el robot paralelo está completando un determinado proceso de clasificación y clasificación de materiales, cuanto mayor es el espacio de actividad de la plataforma móvil, el robot puede agarrar y colocar materiales en un rango mayor. Si los materiales entrantes están en diversas posiciones, la rotación del eje intermedio es alta, lo que lo hace más flexible para manipular artículos en la cinta transportadora para rotarlos, recogerlos y colocarlos en condiciones altas.-operación de velocidad. En resumen, la estabilidad y flexibilidad de la estructura determinarán directamente la precisión del movimiento final y las funciones que el robot puede realizar. En aplicaciones prácticas del mercado, a menudonos encontramos con requisitos de los clientes para grandes ángulos de rotación final, lo cual es un tema importante para los robots paralelos. Debido a que el disco móvil está restringido por el tubo de aire después de instalar el dispositivoneumático, el tubo de aire se enredará durante la rotación y la interfaz del tubo de aire se aflojará y caerá debido a la rotación. Durante el proceso recíproco de alta-Al recoger, colocar y girar rápidamente, el disco móvil del robot paralelo agrava aún más el enrollado, aflojamiento y caída del tubo de aire. No sólo eso, estos problemas existen al mismo tiempo, el desgaste de la tubería de aire es más grave. Con frecuencia se producen una serie de problemas inevitables en el proceso de realización del funcionamiento final flexible del disco móvil. En la producción real,no sólo se convierte en una limitación en el ángulo de rotación del disco móvil, sino que también se convierte en una preocupación para los clientes cuando optan por utilizar robots paralelos. En 2017 se desarrolló el disco móvil con trayectoria de gas giratoria, el anillo colector de gas cerrado, que permite realizar cualquier ángulo de rotación del disco móvil y al mismo tiempo garantiza la estanqueidad de la trayectoria de gas.
El anillo colector de aire incluido integra la ruta del aire en el disco móvil giratorio. Mediante la transformación estructural del disco móvil y la plataforma giratoria que gira hacia abajo, la ruta del aire se integra en el dispositivoneumático cerrado. La ruta de aire del eje intermedio ingresa a la entrada de aire del disco fijo, pasa a través del espacio sellado entre el disco móvil y el disco giratorio inferior y se transmite a la salida de aire del disco giratorio inferior. Al mismo tiempo, los extremos superior e inferior del espacio sellado están sellados por O-anillos de sellado con forma, que realizan la conexión de la ruta de aire, solucionando el problema de que el ángulo de rotación está limitado por la tubería de aire cuando el disco móvil existente se instala con un dispositivoneumático, reduciendo la influencia del devanado de la tubería de aire en el gran ángulo de rotación del disco móvil, y aumentar la flexibilidad del disco móvil. A medida que la producción industrial continúa avanzando hacia la inteligencia, creemos firmemente que los robots paralelos se convertirán en un papel indispensable e importante en el desarrollo de robots industriales debido a su alta-velocidad, alta-precisión y características de proceso flexibles.
Anterior: No más
Próximo: Dongguan Palletizing Robot: una herramienta poderosa para mejorar la eficiencia de producción
