





التقدم التكنولوجي في الروبوتات المتوازية: الأجهزة الدوارة
مع الاعتراف الواسع النطاق بالروبوتات الموازية في مختلف الصناعات، في السنوات الأخيرة، بدأت المزيد والمزيد من الشركات في زيادة تطبيق الروبوتات الصناعية في خطوط الإنتاج. لقد تحولت أيضًا مجالات الصناعة وعمليات خطوط الإنتاج التي تغطيها من السيارات الأصلية المركزة نسبيًا والأغذية والأدوية واللحام وما إلى ذلك، وامتدت تدريجيًا إلى المزيد من الفئات. وبالتالي فإن أداء جسم الروبوت الموازي يواجه تحديات من خلال متطلبات عملية أكثر تنوعًا. باعتبارها آلية روبوت صناعية مهمة، تتمتع الروبوتات المتوازية بالعديد من المزايا مثل القصور الذاتي للحركة الصغيرة، ومساحة الأرضية الصغيرة، والخطأ التراكمي الصغير، ودقة التحكم العالية، والسرعة العالية. في صناعات مثل الأغذية والأدوية والإلكترونيات 3C والطباعة الأكثر صرامة من حيث متطلبات تحسين القدرة الإنتاجية ومتطلبات دقة المعالجة والظروف الصحية، أصبحت الروبوتات المتوازية الخيار الأفضل للتعبئة والفرز والنقل السريع.
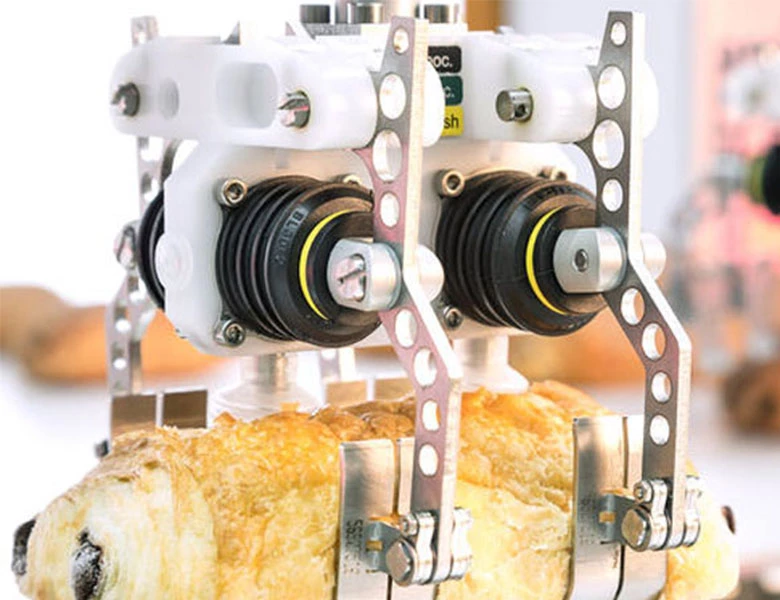
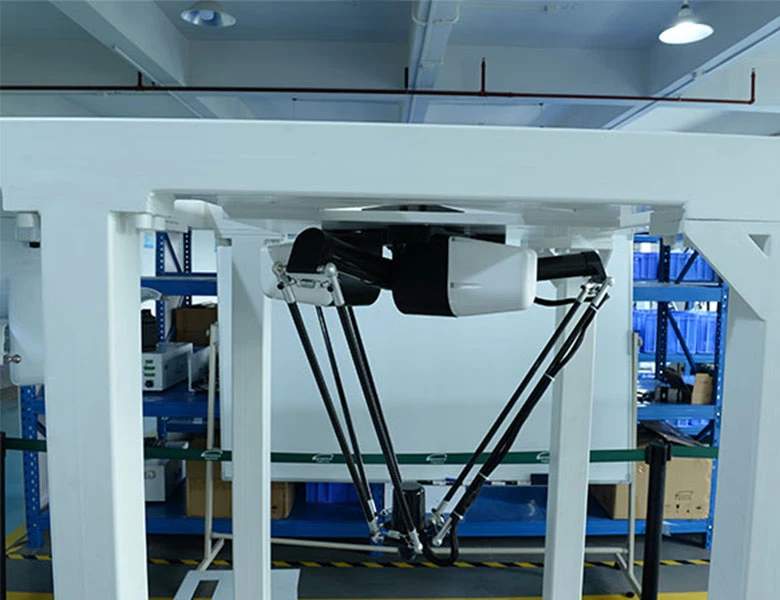
يتكون الهيكل الميكانيكي للروبوت الموازي من منصة ثابتة، وذراع قيادة، وذراع مدفوعة، ومنصة متحركة، وعمود متوسط. ومن بينها المنصة المتحركة (ويسمى أيضًا القرص المتحرك)، وهو جزء مهم من الروبوت الموازي، وهو آلية الإخراج المباشر للروبوت الموازي لتحقيق مسار الحركة. يؤثر النطاق المكاني الذي يمكن أن تصل إليه المنصة المتنقلة بشكل مباشر على مدى المسار أثناء عملية الالتقاط والوضع الطرفي، حتى على سرعة المواد الواردة وسرعة تشغيل الحزام الناقل. لا يعمل التصميم الموجود في نهاية العمود الوسيط كآلية تربط اللوحة الثابتة واللوحة الدوارة فحسب، بل يؤثر أيضًا بشكل مباشر على الزاوية والدقة أثناء عملية الدوران. وهذا يعني أنه عندما يقوم الروبوت الموازي بإكمال عملية فرز معينة وفرز المواد، كلما زادت مساحة نشاط المنصة المتنقلة، يمكن للروبوت التقاط المواد ووضعها في نطاق أكبر. إذا كانت المواد الواردة في مواضع مختلفة، فإن دوران العمود المتوسط يكون مرتفعًا، مما يجعله أكثر مرونة في التعامل مع العناصر الموجودة على الحزام الناقل لتدويرها والتقاطها ووضعها تحت ظروف عالية-عملية السرعة. باختصار، سيحدد استقرار ومرونة الهيكل بشكل مباشر دقة الحركة النهائية والوظائف التي يمكن للروبوت تحقيقها. في تطبيقات السوق العملية، غالبًا ما نواجه متطلبات العملاء لزوايا كبيرة للدوران النهائي، وهي مشكلة مهمة للروبوتات المتوازية. نظرًا لأن القرص المتحرك مقيد بواسطة أنبوب الهواء بعد تثبيت الجهاز الهوائي، فإن أنبوب الهواء سوف يتشابك أثناء الدوران وسوف تصبح واجهة أنبوب الهواء فضفاضة وتسقط بسبب الدوران. أثناء العملية الترددية العالية-التقاط السرعة ووضعها وتدويرها، يؤدي القرص المتحرك للروبوت الموازي إلى تفاقم عملية لف أنبوب الهواء وفكه وسقوطه. ليس هذا فحسب، بل إن هذه المشاكل موجودة في نفس الوقت، حيث يكون تآكل أنابيب الهواء أكثر خطورة. تحدث سلسلة من المشكلات الحتمية بشكل متكرر أثناء عملية تحقيق التشغيل النهائي المرن للقرص المتحرك. في الإنتاج الفعلي، لا يصبح ذلك عائقًا على زاوية دوران القرص المتحرك فحسب، بل يصبح أيضًا مصدر قلق للعملاء عند اختيار استخدام الروبوتات المتوازية. تم تطوير القرص المتحرك بمسار غاز قابل للتدوير، حلقة انزلاق الغاز المغلقة، في عام 2017، والذي يحقق أي زاوية دوران للقرص المتحرك مع ضمان إحكام مسار الغاز.
تعمل حلقة الانزلاق الهوائية المغلقة على دمج مسار الهواء في القرص المتحرك القابل للدوران. من خلال التحويل الهيكلي للقرص المتحرك والقرص الدوار الدوار للأسفل، يتم دمج مسار الهواء في الجهاز الهوائي المغلق. يدخل مسار الهواء للعمود المتوسط إلى مدخل الهواء على القرص الثابت، ويمر عبر المساحة المغلقة بين القرص المتحرك والقرص الدوار السفلي، وينتقل إلى مخرج الهواء على القرص الدوار السفلي. وفي الوقت نفسه، يتم إغلاق الأطراف العلوية والسفلية للمساحة المغلقة بواسطة O-حلقات إغلاق على شكل، تحقق اتصال مسار الهواء، وتحل مشكلة أن زاوية الدوران محدودة بواسطة أنبوب الهواء عندما يتم تثبيت القرص المتحرك الموجود بجهاز هوائي، مما يقلل من تأثير لف أنبوب الهواء على زاوية الدوران الكبيرة القرص المتحرك، وزيادة مرونة القرص المتحرك. ومع استمرار تحرك الإنتاج الصناعي نحو الذكاء، فإننا نؤمن إيمانًا راسخًا بأن الروبوتات الموازية ستصبح دورًا لا غنى عنه ومهمًا في تطوير الروبوتات الصناعية نظرًا لقوتها العالية.-السرعة العالية-الدقة وخصائص العملية المرنة.
سابق: لا أكثر
التالي: أحدث ثورة في عملية تخزين المنصات باستخدام القطع-الحافة التعاونية التقنية
