





Teknologisk gennembrud i parallelle robotter: roterende enheder
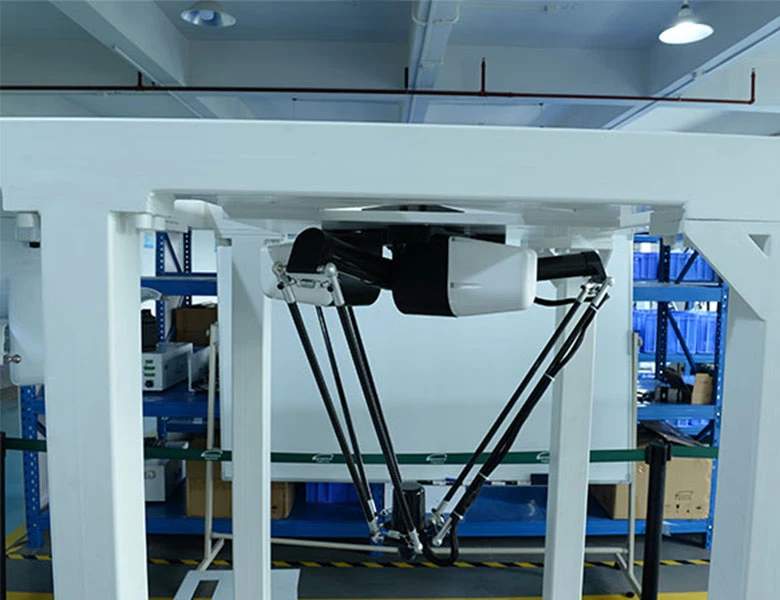
Med den udbredte anerkendelse af parallelle robotter i forskellige industrier er flere og flere virksomheder i de senere år begyndt at øge anvendelsen af industrirobotter i produktionslinjer. De industriområder og produktionslinjeprocesser, de dækker, er også skiftet fra de oprindelige relativt koncentrerede biler, fødevarer, lægemidler, svejsning osv., gradvist udvidet til flere kategorier. Ydeevnen af den parallelle robotkrop er derfor udfordret af mere forskelligartede proceskrav. Som en vigtig industrirobotmekanisme har parallelle robotter mange fordele, såsom lille bevægelsesinerti, lille gulvareal, lille kumulativ fejl, høj kontrolnøjagtighed og høj hastighed. I industrier som fødevarer, medicin, 3C-elektronik og print, der er strengere med hensyn til krav til forbedring af produktionskapacitet, krav til behandlingsnøjagtighed og sanitære forhold, er parallelle robotter blevet det bedste valg til hurtig emballering, sortering og overførsel.
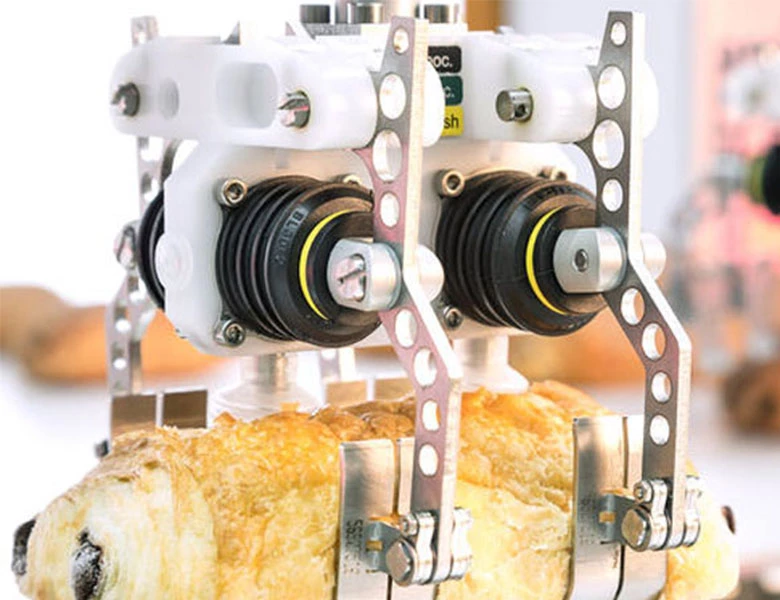
Den mekaniske struktur af den parallelle robot består af en statisk platform, en drivarm, en drevet arm, en bevægelig platform og en mellemaksel. Blandt dem, den bevægelige platform (også kaldet den bevægelige disk), som er en vigtig del af den parallelle robot, er den direkte udgangsmekanisme for den parallelle robot til at realisere bevægelsesbanen. Den rumlige rækkevidde, som den mobile platform kannå, påvirker direkte banespændet under terminal pick and place-processen, selv den indgående materialehastighed og transportbåndets kørehastighed. Designet for enden af den mellemliggende aksel tjener ikke kun som en mekanisme, der forbinder den faste plade og den roterende plade, men påvirker også direkte vinklen ognøjagtigheden under rotationsprocessen. Det vil sige, atnår den parallelle robot gennemfører en bestemt sorterings- og materialesorteringsproces, jo større aktivitetsrum på den mobile platform, kan robotten gribe og placere materialer i et større område. Hvis de indkommende materialer er i forskellige positioner, er rotationen af den mellemliggende aksel høj, hvilket gør den mere fleksibel for håndtering af emner på transportbåndet at rotere og plukke og placere dem under høj-hastighedsdrift. Kort sagt vil stabiliteten og fleksibiliteten af strukturen direkte bestemmenøjagtigheden af slutbevægelsen og de funktioner, robotten kan opnå. I praktiske markedsapplikationer støder vi ofte på kundekrav om store endedrejningsvinkler, hvilket er et vigtigt emne for parallelle robotter. Fordi den bevægelige skive er begrænset af luftrøret efter installation af den pneumatiske anordning, vil luftrøret blive viklet ind under rotationen, og luftrørsgrænsefladen vil blive løs og falde af på grund af rotation. Under den frem- og tilbagegående proces af høj-hastighedsplukning, placering og rotation forværrer den bevægelige skive i den parallelle robot yderligere viklingen, løsnelsen og falden af luftrøret. Ikkenok med det, disse problemer eksisterer på samme tid, sliddet på luftrøret er mere alvorligt. En række uundgåelige problemer opstår ofte i processen med at realisere fleksibel slutdrift af den bevægelige disk. I den faktiske produktion bliver det ikke kun en begrænsning for rotationsvinklen på den bevægelige skive, men bliver også en bekymring for kunderne,når de vælger at bruge parallelle robotter. Den bevægelige skive med en roterbar gasbane, den medfølgende gasslipring, blev udviklet i 2017, som realiserer enhver rotationsvinkel af den bevægelige skive, samtidig med at gasbanens tæthed sikres.
Den medfølgende luftslipring integrerer luftvejen i den roterbare, bevægelige skive. Gennem strukturel transformation af den bevægelige skive og dennedad roterende drejeskive er luftvejen integreret i den lukkede pneumatiske enhed. Den mellemliggende aksels luftvej kommer ind i luftindtaget på den faste skive, passerer gennem det forseglede rum mellem den bevægelige skive og dennedre roterende skive og overføres til luftudgangen på dennedre roterende skive. Samtidig er den øvre ognedre ende af det forseglede rum forseglet af O-formede tætningsringe, der realiserer forbindelsen af luftvejen, løser problemet med, at rotationsvinklen er begrænset af luftrøret,når den eksisterende bevægelige skive er installeret med en pneumatisk enhed, hvilket reducerer påvirkningen af luftrørsviklingen på den store rotationsvinkel af den bevægelige disk og øge fleksibiliteten af den bevægelige disk. Efterhånden som industriproduktionen fortsætter med at bevæge sig i retning af intelligens, er vi overbevist om, at parallelle robotter vil blive en uundværlig og vigtig rolle i udviklingen af industrirobotter på grund af deres høje-hastighed, høj-præcision og fleksible procesegenskaber.
Tidligere: Ikke mere
Næste: Revolutionér din palleteringsproces med skæring-Edge Collaborative Tech
