





Технологический прорыв в параллельных роботах: вращающиеся устройства
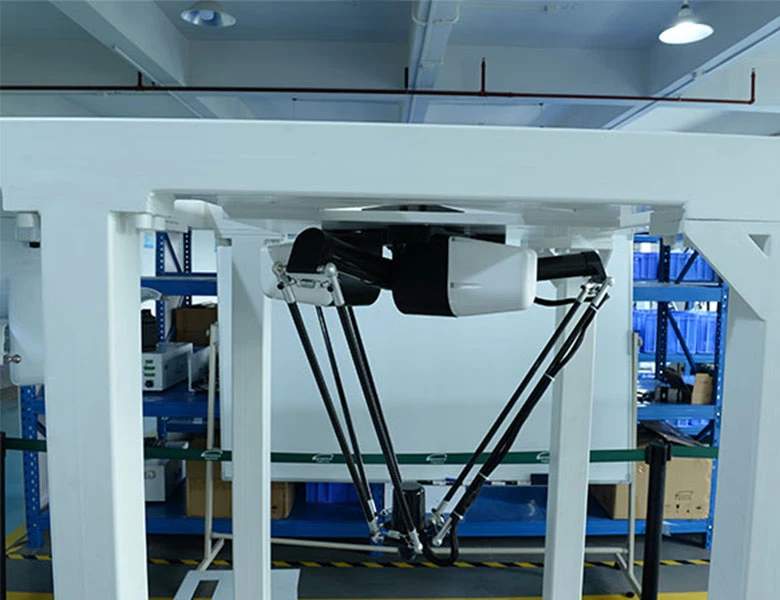
Благодаря широкому признанию параллельных роботов в различных отраслях промышленности в последние годы все больше и больше компаний начали расширять применение промышленных роботов на производственных линиях. Области промышленности и производственные процессы, которые они охватывают, также сместились с первоначально относительно сконцентрированных автомобилей, продуктов питания, фармацевтики, сварки и т. д. и постепенно расширились на большее количество категорий. Таким образом, производительность параллельного корпуса робота подвергается сомнению из-за более разнообразных технологических требований. Являясь важным механизмом промышленного робота, параллельные роботы имеют множество преимуществ, таких как небольшая инерция движения, небольшая площадь пола, небольшая совокупная ошибка, высокая точность управления и высокая скорость. В таких отраслях, как пищевая промышленность, медицина, 3C-электроника и полиграфия, где требования к повышению производственных мощностей, точности обработки и санитарным условиям более строгие, параллельные роботы стали лучшим выбором для быстрой упаковки, сортировки и транспортировки.
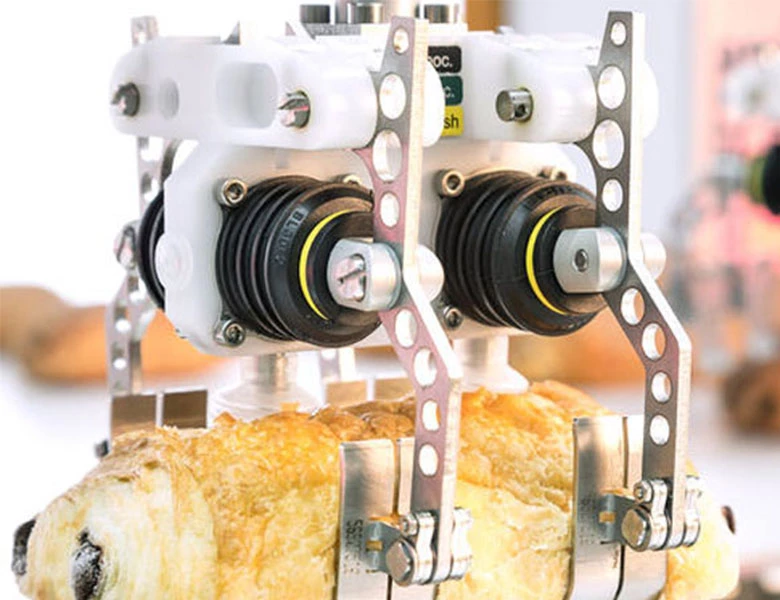
Механическая конструкция параллельного робота состоит из статической платформы, ведущего рычага, ведомого рычага, подвижной платформы и промежуточного вала. Среди них движущаяся платформа (также называется подвижным диском), который является важной частью параллельного робота, является механизмом прямого вывода параллельного робота для реализации траектории движения. Пространственный диапазон, которого может достичь мобильная платформа, напрямую влияет на пролет пути во время процесса захвата и размещения терминала, даже на скорость поступающего материала и скорость движения конвейерной ленты. Конструкция на конце промежуточного вала не только служит механизмом, соединяющим неподвижную пластину и вращающуюся пластину, но также напрямую влияет на угол и точность в процессе вращения. То есть, когда параллельный робот завершает определенный процесс сортировки и сортировки материалов, чем больше пространство активности мобильной платформы, тем робот может захватывать и размещать материалы в большем диапазоне. Если поступающие материалы находятся в разных положениях, вращение промежуточного вала является высоким, что делает его более гибким при перемещении предметов на конвейерной ленте, их вращении, подборе и размещении под высокой высотой.-скоростная работа. Короче говоря, стабильность и гибкость конструкции напрямую определяют точность конечного движения и функции, которые может выполнять робот. В практических рыночных приложениях мы часто сталкиваемся с требованиями клиентов к большим углам поворота концов, что является важной проблемой для параллельных роботов. Поскольку подвижный диск ограничен воздушной трубой после установки пневматического устройства, воздушная труба будет запутываться во время вращения, а интерфейс воздушной трубы станет свободным и упадет из-за вращения. Во время возвратно-поступательного процесса высокой-При выборе скорости, размещении и вращении подвижный диск параллельного робота еще больше усугубляет наматывание, ослабление и падение воздушной трубы. Мало того, эти проблемы существуют одновременно, износ воздуховодов является более серьезным. В процессе реализации гибкой конечной операции подвижного диска часто возникает ряд неизбежных проблем. В реальном производстве это не только становится ограничением угла поворота подвижного диска, но и становится проблемой для клиентов при выборе использования параллельных роботов. В 2017 году разработан подвижный диск с поворотным газовым трактом - закрытое газовое контактное кольцо, реализующее любой угол поворота подвижного диска при обеспечении герметичности газового тракта.
Закрытое воздушное контактное кольцо объединяет воздушный путь во вращающийся подвижный диск. За счет структурной трансформации подвижного диска и поворотной платформы, вращающейся вниз, воздушный путь интегрирован в закрытое пневматическое устройство. Воздушный тракт промежуточного вала входит в воздухозаборник на неподвижном диске, проходит через герметичное пространство между подвижным диском и нижним вращающимся диском и передается к воздуховыпускному отверстию на нижнем вращающемся диске. При этом верхний и нижний торцы герметизированного пространства герметизируются О-фасонные уплотнительные кольца, реализующие соединение воздушного пути, решающие проблему ограничения угла поворота воздушной трубой при установке существующего подвижного диска с пневматическим устройством, уменьшающие влияние намотки воздушной трубы на большой угол поворота подвижного диска и повышение гибкости подвижного диска. Поскольку промышленное производство продолжает двигаться в сторону интеллекта, мы твердо верим, что параллельные роботы станут незаменимой и важной ролью в разработке промышленных роботов благодаря их высоким-скорость, высокая-точность и гибкие характеристики процесса.
Предыдущий: Больше не надо
Следующий: Революционируйте процесс паллетирования с помощью резки-Крайняя технология совместной работы
