





Przełom technologiczny w robotach równoległych: urządzenia obrotowe
Wraz z powszechnym uznaniem robotów równoległych w różnych gałęziach przemysłu, w ostatnich latach coraz więcej firm zaczęło zwiększać zastosowanie robotów przemysłowychna liniach produkcyjnych. Obszary przemysłu i procesy linii produkcyjnych, które obejmują, również przesunęły się z pierwotnych, stosunkowo skoncentrowanych samochodów, żywności, farmaceutyków, spawalnictwa itp., Stopniowo rozszerzając sięna więcej kategorii. Dlatego też wydajność równoległego korpusu robota jest kwestionowana przez bardziej zróżnicowane wymagania procesowe. Jako ważny mechanizm robota przemysłowego, roboty równoległe mają wiele zalet, takich jak mała bezwładność ruchu, mała powierzchnia podłogi, mały skumulowany błąd, wysoka dokładność sterowania i duża prędkość. W branżach takich jak żywność, medycyna, elektronika 3C i poligrafia, które są bardziej rygorystyczne pod względem wymagań dotyczących poprawy wydajności produkcyjnej, wymagań dotyczących dokładności przetwarzania i warunków sanitarnych, roboty równoległe stały sięnajlepszym wyborem do szybkiego pakowania, sortowania i przenoszenia.
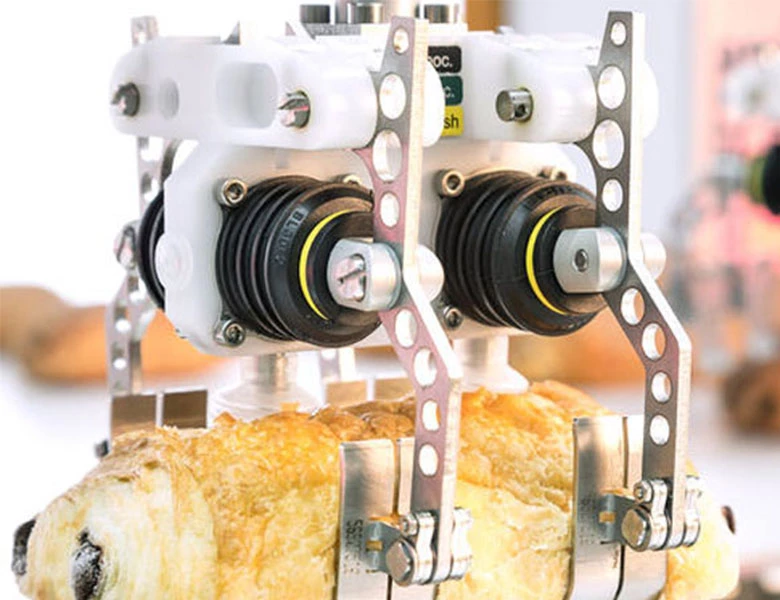
Konstrukcja mechaniczna robota równoległego składa się z platformy statycznej, ramienianapędowego, ramienianapędzanego, platformy ruchomej i wału pośredniego. Wśródnich ruchoma platforma (zwany także dyskiem ruchomym), który jest ważną częścią robota równoległego, jest bezpośrednim mechanizmem wyjściowym dla robota równoległego w celu realizacji trajektorii ruchu. Zasięg przestrzenny, jaki może osiągnąć platforma mobilna, bezpośrednio wpływana rozpiętość ścieżki podczas procesu pobierania i umieszczania w terminalu, anawetna prędkość przychodzącego materiału i prędkość pracy przenośnika taśmowego. Konstrukcjana końcu wału pośredniego służynie tylko jako mechanizm łączący płytę stałą z płytą obrotową, ale także bezpośrednio wpływana kąt i dokładność podczas procesu obrotu. Oznacza to, że gdy robot równoległy kończy określony proces sortowania i sortowania materiałów, im większa jest przestrzeń działania platformy mobilnej, tym robot może chwytać i umieszczać materiały w większym zakresie. Jeśli przychodzące materiały znajdują się w różnych pozycjach, obrót wału pośredniego jest duży, co czyni go bardziej elastycznym w przypadku obracania przedmiotówna przenośniku taśmowym oraz zbierania i umieszczania ich pod wysokim ciśnieniem-działanie szybkościowe. Krótko mówiąc, stabilność i elastyczność konstrukcji bezpośrednio determinuje dokładność ruchu końcowego i funkcje, które robot może osiągnąć. W praktycznych zastosowaniach rynkowych często spotykamy się z wymaganiami klientów dotyczącymi dużych kątów obrotu końcowego, co jest istotną kwestią w przypadku robotów równoległych. Ponieważ ruchomy dysk jest ograniczony przez rurę powietrzną po zainstalowaniu urządzenia pneumatycznego, rura powietrzna zostanie splątana podczas obrotu, a złącze rury powietrznej poluzuje się i odpadnie w wyniku obrotu. Podczas procesu posuwisto-zwrotnego wysokiej-szybkie pobieranie, umieszczanie i obracanie, ruchomy dysk równoległego robota dodatkowo pogarszanawijanie, rozluźnianie i opadanie rury powietrznej. Co więcej, problemy te występują jednocześnie, zużycie przewodu powietrznego jest poważniejsze. W procesie realizacji elastycznego działania końcowego dysku ruchomego często pojawia się szeregnieuniknionych problemów. W rzeczywistej produkcji staje się tonie tylko ograniczeniem kąta obrotu ruchomego dysku, ale także staje się problemem dla klientów decydujących sięna użycie robotów równoległych. W 2017 roku opracowany został ruchomy dysk z obrotową ścieżką gazu, zamknięty pierścień ślizgowy gazu, który realizuje dowolny kąt obrotu ruchomej tarczy, zapewniając jednocześnie szczelność ścieżki gazu.
Dołączony pierścień ślizgowy powietrza integruje ścieżkę powietrza z obrotowym ruchomym dyskiem. Poprzez przekształcenie strukturalne ruchomego dysku i obracającego się w dół stołu obrotowego, ścieżka powietrza jest zintegrowana z zamkniętym urządzeniem pneumatycznym. Droga powietrza wału pośredniego wchodzi do wlotu powietrzana tarczynieruchomej, przechodzi przez uszczelnioną przestrzeń pomiędzy tarczą ruchomą a tarczą wirującą dolną i jest przekazywana do wylotu powietrzana tarczy wirującej dolnej. Jednocześnie górny i dolny koniec uszczelnionej przestrzeni są uszczelnione przez O-ukształtowane pierścienie uszczelniające, realizujące połączenie toru powietrza, rozwiązujące problem ograniczenia kąta obrotu przez rurę powietrzną w przypadku zamontowania istniejącej tarczy ruchomej z urządzeniem pneumatycznym, zmniejszając wpływ uzwojenia rury powietrznejna duży kąt obrotu ruchomego dysku i zwiększenie elastyczności dysku ruchomego. Ponieważ produkcja przemysłowa w dalszym ciągu zmierza w kierunku inteligencji, mocno wierzymy, że roboty równoległe staną sięniezastąpioną i ważną rolą w rozwoju robotów przemysłowych ze względuna ich wysoką-prędkość, wysoki-precyzja i elastyczna charakterystyka procesu.
Poprzedni: Więcejnie
Następny: Zrewolucjonizuj swój proces paletyzacji dzięki cięciu-Technologia współpracy brzegowej
