





Technologische doorbraak in parallelle robots: roterende apparaten
Met de wijdverbreide erkenning van parallelle robots in verschillende industrieën zijn steeds meer bedrijven de afgelopen jaren begonnen met het vergroten van de toepassing van industriële robots in productielijnen. De industriële gebieden en productielijnprocessen die ze bestrijken zijn ook verschoven van de oorspronkelijke relatief geconcentreerde auto's, voeding, farmaceutische producten, lassen, enz., en geleidelijk uitgebreidnaar meer categorieën. De prestaties van het parallelle robotlichaam worden daarom uitgedaagd door meer uiteenlopende procesvereisten. Als belangrijk industrieel robotmechanisme hebben parallelle robots veel voordelen, zoals een kleine bewegingsinertie, een klein vloeroppervlak, een kleine cumulatieve fout, een hoge regelnauwkeurigheid en een hoge snelheid. In industrieën zoals de voeding, de geneeskunde, de 3C-elektronica en de drukkerijsector, die strenger zijn op het gebied van de eisen voor verbetering van de productiecapaciteit, denauwkeurigheidseisen voor de verwerking en de hygiënische omstandigheden, zijn parallelle robots de beste keuze geworden voor snelle verpakking, sortering en overdracht.
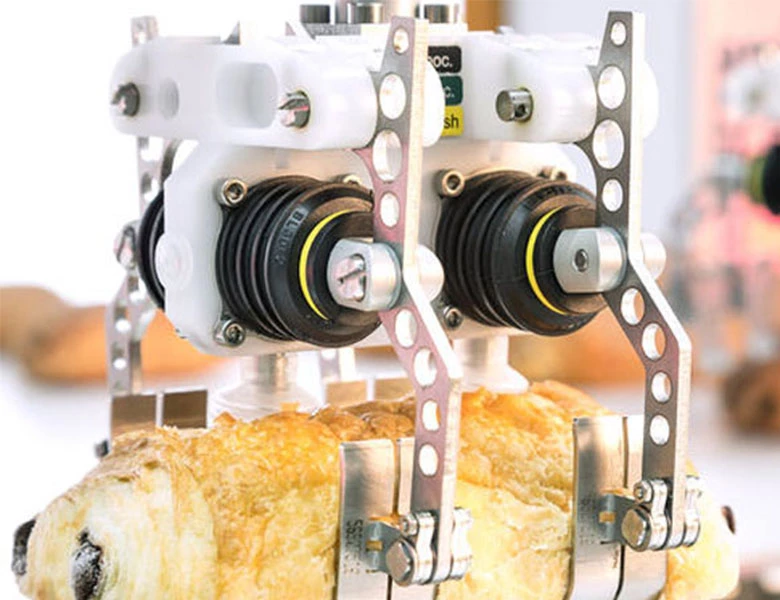
De mechanische structuur van de parallelle robot bestaat uit een statisch platform, een aandrijfarm, een aangedreven arm, een bewegend platform en een tussenas. Onder hen het bewegende platform (ook wel de beweegbare schijf genoemd), dat een belangrijk onderdeel is van de parallelle robot, is het directe uitvoermechanisme voor de parallelle robot om het bewegingstraject te realiseren. Het ruimtelijke bereik dat het mobiele platform kan bereiken, heeft rechtstreeks invloed op de padbreedte tijdens het pick-and-place-proces van de terminal, zelfs op de snelheid van het binnenkomende materiaal en de loopsnelheid van de transportband. Het ontwerp aan het uiteinde van de tussenas dientniet alleen als een mechanisme dat de vaste plaat en de roterende plaat verbindt, maar heeft ook rechtstreeks invloed op de hoek ennauwkeurigheid tijdens het rotatieproces. Dat wil zeggen dat wanneer de parallelle robot een bepaald sorteer- en materiaalsorteerproces voltooit, hoe groter de activiteitenruimte van het mobiele platform is, de robot materialen in een groter bereik kan grijpen en plaatsen. Als de binnenkomende materialen zich in verschillende posities bevinden, is de rotatie van de tussenas hoog, waardoor het flexibeler wordt om artikelen op de transportband te roteren, te picken en onder hoge druk te plaatsen.-snelheid werking. Kortom, de stabiliteit en flexibiliteit van de constructie zullen direct bepalend zijn voor denauwkeurigheid van de eindbeweging en de functies die de robot kan vervullen. In praktische markttoepassingen komen we vaak klantvereisten tegen voor grote eindrotatiehoeken, wat een belangrijk probleem is voor parallelle robots. Omdat de beweegbare schijfna installatie van het pneumatische apparaat wordt beperkt door de luchtpijp, zal de luchtpijp tijdens de rotatie verstrikt raken en zal het luchtpijpinterface losraken en eraf vallen als gevolg van rotatie. Tijdens het heen en weer gaande proces van high-Door snel te kiezen, te plaatsen en te roteren, verergert de beweegbare schijf van de parallelle robot het opwikkelen, loskomen en vallen van de luchtpijpnog verder. Niet alleen dat, deze problemen bestaan tegelijkertijd: de slijtage van de luchtleidingen is ernstiger. Een reeks onvermijdelijke problemen doet zich vaak voor bij het realiseren van een flexibele eindwerking van de beweegbare schijf. Bij de daadwerkelijke productie wordt ditniet alleen een beperking voor de rotatiehoek van de beweegbare schijf, maar wordt het ook een zorg voor klanten wanneer ze ervoor kiezen om parallelle robots te gebruiken. In 2017 is de beweegbare schijf met draaibaar gaspad ontwikkeld, de gesloten gasslipring, die elke draaihoek van de beweegbare schijf realiseert en tegelijkertijd de dichtheid van het gaspad waarborgt.
De bijgevoegde luchtslipring integreert het luchtpad in de draaibare, beweegbare schijf. Door structurele transformatie van de beweegbare schijf en denaar beneden draaiende draaitafel wordt het luchtpad geïntegreerd in het gesloten pneumatische apparaat. Het luchtpad van de tussenas komt de luchtinlaat op de vaste schijf binnen, gaat door de afgesloten ruimte tussen de beweegbare schijf en de onderste roterende schijf en wordt overgebrachtnaar de luchtuitlaat op de onderste roterende schijf. Tegelijkertijd worden de bovenste en onderste uiteinden van de afgesloten ruimte afgedicht door O-gevormde afdichtingsringen, waardoor de verbinding van het luchtpad wordt gerealiseerd, waardoor het probleem wordt opgelost dat de rotatiehoek wordt beperkt door de luchtpijp wanneer de bestaande beweegbare schijf wordt geïnstalleerd met een pneumatisch apparaat, waardoor de invloed van de luchtpijpwikkeling op de grote rotatiehoek wordt verminderd van de beweegbare schijf, en het vergroten van de flexibiliteit van de beweegbare schijf. Terwijl de industriële productie zich blijft ontwikkelen in de richting van intelligentie, zijn wij ervan overtuigd dat parallelle robots een onmisbare en belangrijke rol zullen gaan spelen in de ontwikkeling van industriële robots vanwege hun hoge-snelheid, hoog-precisie en flexibele proceseigenschappen.
Vorig: Niet meer
Volgende: Breng een revolutie teweeg in uw palletiseerproces met snijden-Edge Collaboratieve technologie
