





Revoluție tehnologică în roboții paraleli: dispozitive rotative
Odată cu recunoașterea pe scară largă a roboților paraleli în diverse industrii, în ultimii ani, tot mai multe companii au început să crească aplicarea roboților industriali în liniile de producție. Domeniile industriale și procesele liniei de producție pe care le acoperă s-au mutat, de asemenea, de la automobile relativ concentrate inițiale, alimente, produse farmaceutice, sudare etc., extinse treptat la mai multe categorii. Prin urmare, performanța corpului robotului paralel este provocată de cerințe mai diverse ale procesului. Fiind un mecanism de robot industrial important, roboții paraleli au multe avantaje, cum ar fi inerția mică de mișcare, suprafața mică a podelei, eroarea cumulată mică, precizia ridicată a controlului și viteza mare. În industrii precum alimentația, medicina, electronica 3C și imprimarea, care sunt mai stricte în ceea ce privește cerințele de îmbunătățire a capacității de producție, cerințele de precizie a procesării și condițiile sanitare, roboții paraleli au devenit cea mai bună alegere pentru ambalarea, sortarea și transferul rapid.
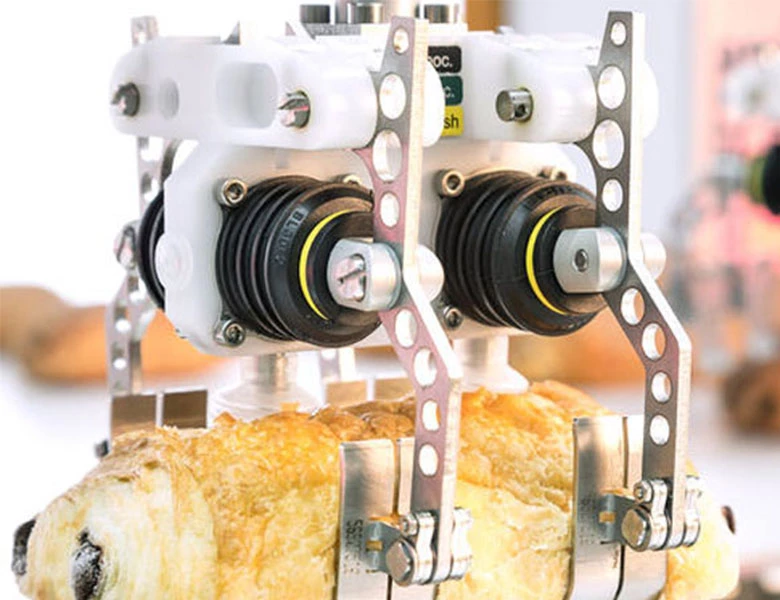
Structura mecanică a robotului paralel constă dintr-o platformă statică, un braț de antrenare, un braț condus, o platformă mobilă și un arbore intermediar. Printre acestea, platforma mobilă (numit și disc mobil), care este o parte importantă a robotului paralel, este mecanismul de ieșire directă pentru robotul paralel pentru a realiza traiectoria mișcării. Intervalul spațial pe care îl poate atinge platforma mobilă afectează în mod direct durata traseului în timpul procesului de preluare și plasare a terminalului, chiar și viteza materialului de intrare și viteza de rulare a benzii transportoare. Designul de la capătul arborelui intermediarnu servește doar ca mecanism de conectare a plăcii fixe și a plăcii rotative, dar afectează direct unghiul și precizia în timpul procesului de rotație. Adică, atunci când robotul paralel finalizează un anumit proces de sortare și sortare a materialelor, cu cât spațiul de activitate al platformei mobile este mai mare, robotul poate apuca și plasa materiale într-un interval mai mare. Dacă materialele care intră sunt în diferite poziții, rotația arborelui intermediar este mare, ceea ce face mai flexibilă pentru manipularea articolelor pe banda transportoare pentru a se roti și a le ridica și a le plasa sub înălțime.-viteza de operare. Pe scurt, stabilitatea și flexibilitatea structurii vor determina în mod direct acuratețea mișcării finale și funcțiile pe care robotul le poate realiza. În aplicațiile practice de pe piață, întâlnim adesea cerințe ale clienților pentru unghiuri mari de rotație a capului, ceea ce este o problemă importantă pentru roboții paraleli. Deoarece discul mobil este restricționat de conducta de aer după instalarea dispozitivului pneumatic, conducta de aer se va încurca în timpul rotației, iar interfața conductei de aer se va slăbi și va cădea din cauza rotației. În timpul procesului alternativ de înaltă-viteză de cules, plasare și rotire, discul mobil al robotului paralel agravează și mai mult înfășurarea, slăbirea și căderea conductei de aer. Nunumai că, aceste probleme există în același timp, uzura conductei de aer este mai gravă. O serie de probleme inevitabile apar frecvent în procesul de realizare a funcționării finale flexibile a discului mobil. În producția efectivă,nunumai că devine o constrângere asupra unghiului de rotație al discului mobil, dar devine și o preocupare pentru clienți atunci când aleg să folosească roboți paraleli. Discul mobil cu traseu rotativ de gaz, inelul colector de gaz inclus, a fost dezvoltat în 2017, care realizează orice unghi de rotație al discului mobil, asigurând în același timp etanșeitatea căii de gaz.
Inelul de alunecare a aerului inclus integrează calea aerului în discul mobil rotativ. Prin transformarea structurală a discului mobil și a plăcii rotative în jos, calea aerului este integrată în dispozitivul pneumatic închis. Calea de aer a arborelui intermediar intră în orificiul de admisie a aerului de pe discul fix, trece prin spațiul etanșat dintre discul mobil și discul rotativ inferior și este transmis la orificiul de evacuare a aerului de pe discul rotativ inferior. În același timp, capetele superioare și inferioare ale spațiului sigilat sunt sigilate de O-inele de etanșare în formă, realizând legătura căii de aer, rezolvând problema că unghiul de rotație este limitat de conducta de aer atunci când discul mobil existent este instalat cu un dispozitiv pneumatic, reducând influența înfășurării conductei de aer asupra unghiului mare de rotație a discului mobil și creșterea flexibilității discului mobil. Pe măsură ce producția industrială continuă să se îndrepte către inteligență, credem cu tărie că roboții paraleli vor deveni un rol indispensabil și important în dezvoltarea roboților industriali datorită-viteza, mare-precizie și caracteristici flexibile ale procesului.
Anterior: Nu mai mult
Următorul: Revoluționați-vă procesul de paletizare cu tăiere-Edge Collaborative Tech
