





Tekniskt genombrott i parallella robotar: roterande enheter
Med det utbredda erkännandet av parallella robotar i olika branscher har fler och fler företag under senare år börjat öka användningen av industrirobotar i produktionslinjer. De industriområden och produktionslinjeprocesser som de täcker har också flyttats från de ursprungliga relativt koncentrerade bilarna, livsmedel, läkemedel, svetsning, etc., gradvis utvidgats till fler kategorier. Den parallella robotkroppens prestanda utmanas därför av mer olika processkrav. Som en viktig industrirobotmekanism har parallella robotar många fördelar såsom liten rörelsetröghet, liten golvyta, litet kumulativt fel, hög kontrollnoggrannhet och snabb hastighet. Inom industrier som livsmedel, medicin, 3C-elektronik och tryckning som är strängarenär det gäller krav på förbättring av produktionskapacitet, krav på bearbetningsnoggrannhet och sanitära förhållanden, har parallella robotar blivit det bästa valet för snabb packning, sortering och överföring.
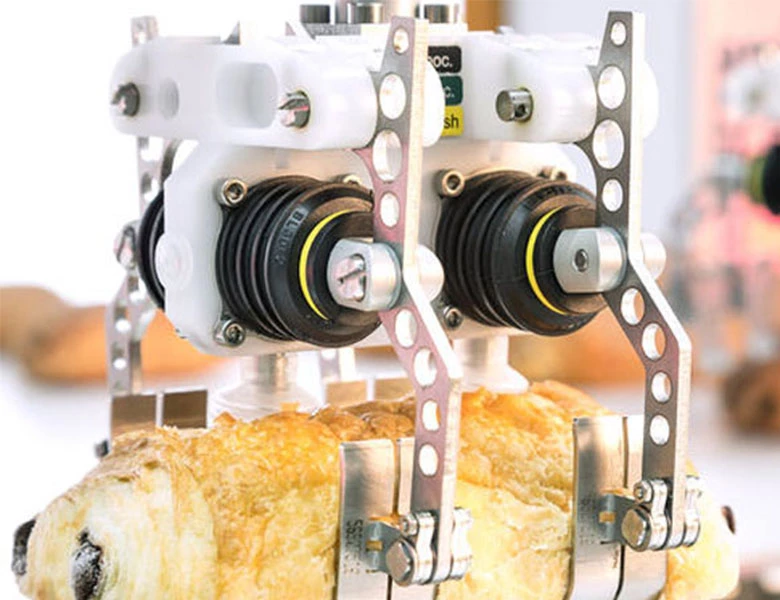
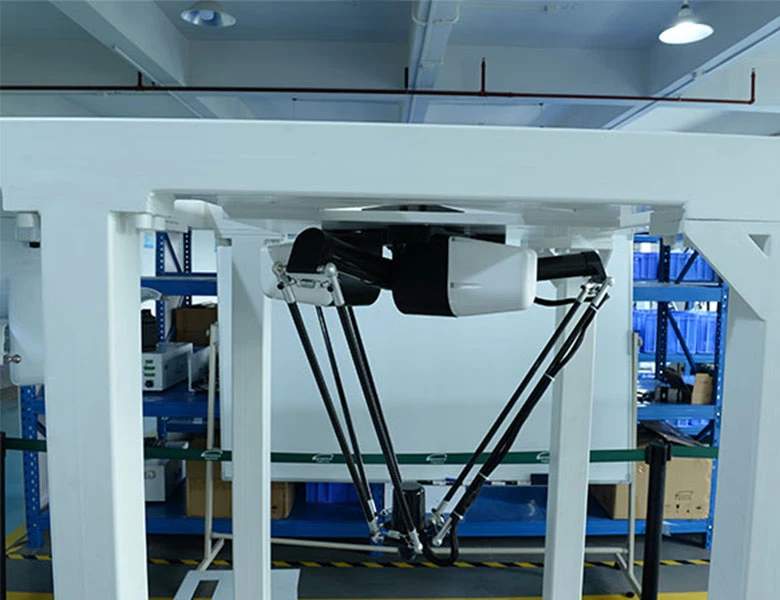
Den mekaniska strukturen hos den parallella roboten består av en statisk plattform, en drivarm, en driven arm, en rörlig plattform och en mellanaxel. Bland dem den rörliga plattformen (även kallad den rörliga disken), som är en viktig del av den parallella roboten, är den direkta utmatningsmekanismen för den parallella roboten för att realisera rörelsebanan. Den spatiala räckvidden som den mobila plattformen kannå påverkar direkt banans spännvidd under terminalplockningsprocessen, även hastigheten för inkommande material och transportbandets körhastighet. Designen vid änden av mellanaxeln fungerar inte bara som en mekanism som förbinder den fasta plattan och den roterande plattan, utan påverkar också direkt vinkeln ochnoggrannheten under rotationsprocessen. Det vill säga,när den parallella roboten slutför en viss sorterings- och materialsorteringsprocess, ju större aktivitetsutrymme den mobila plattformen har, kan roboten ta tag i och placera material i ett större intervall. Om det inkommande materialet är i olika positioner, är rotationen av mellanaxeln hög, vilket gör det mer flexibelt för hantering av föremål på transportbandet att rotera och plocka och placera dem under hög-hastighetsdrift. Kort sagt, strukturens stabilitet och flexibilitet kommer direkt att avgöra exaktheten i slutrörelsen och de funktioner som roboten kan uppnå. I praktiska marknadsapplikationer möter vi ofta kundkrav på stora ändrotationsvinklar, vilket är en viktig fråga för parallella robotar. Eftersom den rörliga skivan är begränsad av luftröret efter installation av den pneumatiska anordningen, kommer luftröret att trasslas ihop under rotationen och luftrörets gränssnitt kommer att lossna och falla av på grund av rotation. Under den fram- och tillbakagående processen av hög-hastighetsplockning, placering och rotation, den rörliga skivan på den parallella roboten förvärrar ytterligare lindningen, lossningen och fallet av luftröret. Intenog med det, dessa problem finns samtidigt, luftrörsslitaget är allvarligare. En serie oundvikliga problem uppstår ofta i processen för att förverkliga flexibel slutoperation av den rörliga skivan. I den faktiska produktionen blir det inte bara en begränsning av den rörliga skivans rotationsvinkel, utan blir också ett bekymmer för kundernanär de väljer att använda parallella robotar. Den rörliga skivan med en roterbar gasbana, den inneslutna gassläpringen, utvecklades 2017, som realiserar alla rotationsvinklar för den rörliga skivan samtidigt som gasbanan är tät.
Den inneslutna luftsläpringen integrerar luftvägen i den roterbara rörliga skivan. Genom strukturell omvandling av den rörliga skivan och dennedåtroterande skivspelaren integreras luftvägen i den slutna pneumatiska enheten. Den mellanliggande axelns luftväg kommer in i luftinloppet på den fasta skivan, passerar genom det tätade utrymmet mellan den rörliga skivan och dennedre roterande skivan och överförs till luftutloppet på dennedre roterande skivan. Samtidigt förseglas de övre ochnedre ändarna av det förseglade utrymmet av O-formade tätningsringar, realiserar anslutningen av luftvägen, löser problemet att rotationsvinkeln begränsas av luftröretnär den befintliga rörliga skivan är installerad med en pneumatisk anordning, vilket minskar inverkan av luftrörslindningen på den stora rotationsvinkeln av den rörliga skivan, och öka flexibiliteten hos den rörliga skivan. När industriproduktionen fortsätter att gå mot intelligens, är vi övertygade om att parallella robotar kommer att bli en oumbärlig och viktig roll i utvecklingen av industrirobotar på grund av deras höga-hastighet, hög-precision och flexibla processegenskaper.
Tidigare: Inte mer
Nästa: Revolutionera din palleteringsprocess med skärning-Edge Collaborative Tech
