





Technologický průlom v paralelních robotech: rotační zařízení
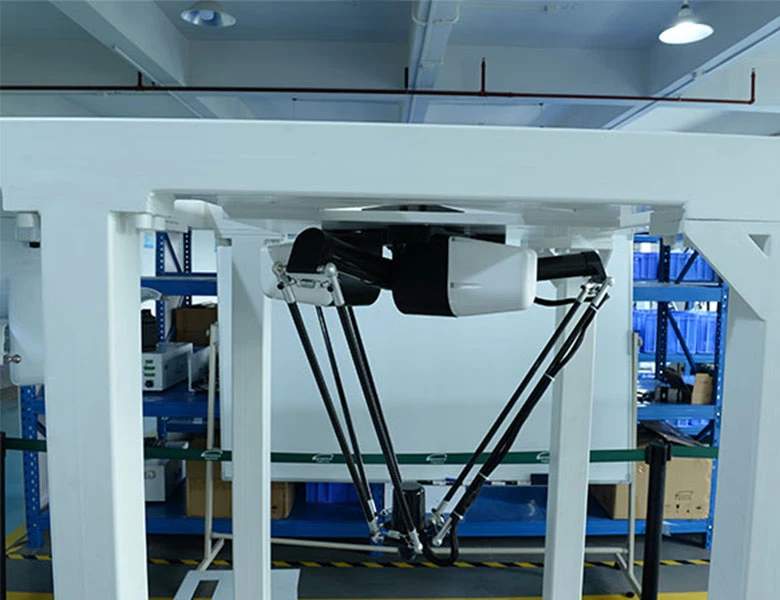
S rozšířeným uznáním paralelních robotů v různých průmyslových odvětvích začalo v posledních letech stále více společností zvyšovat uplatnění průmyslových robotů ve výrobních linkách. Od původních relativně koncentrovaných automobilů, potravinářství, farmacie, svařování atd. se postupně přesunuly i oblasti průmyslu a procesy výrobních linek, které pokrývají, a postupně se rozšířily do více kategorií. Výkon těla paralelního robota je proto zpochybňován rozmanitějšími procesními požadavky. Jako důležitý mechanismus průmyslových robotů mají paralelní roboty mnoho výhod, jako je malá setrvačnost pohybu, malá podlahová plocha, malá kumulativní chyba, vysoká přesnost řízení a vysoká rychlost. V odvětvích, jako je potravinářství, lékařství, 3C elektronika a tisk, které jsou přísnější z hlediska požadavkůna zlepšení výrobní kapacity, požadavkůna přesnost zpracování a hygienických podmínek, se paralelní roboty stalynejlepší volbou pro rychlé balení, třídění a přenos.
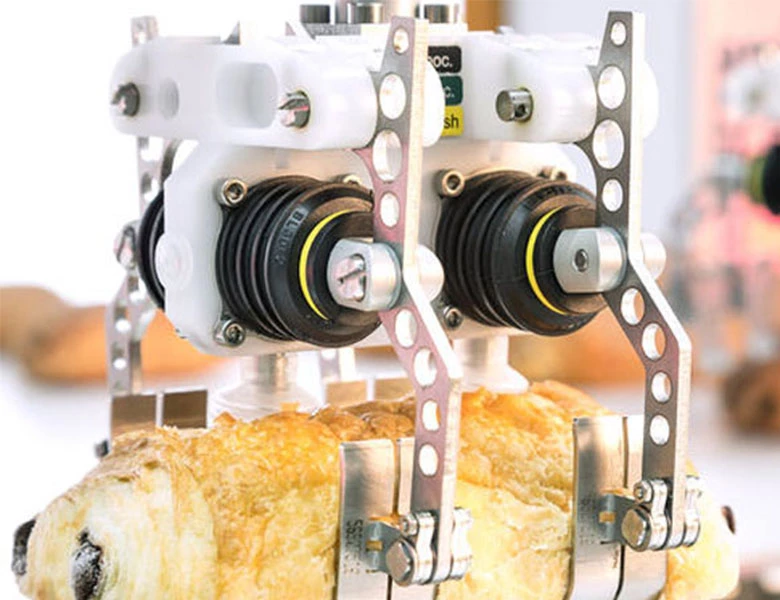
Mechanická konstrukce paralelního robota se skládá ze statické plošiny, hnacího ramene, hnaného ramene, pohyblivé plošiny a mezihřídele. Mezinimi pohyblivá plošina (takénazývaný pohyblivý disk), který je důležitou součástí paralelního robotu, je přímým výstupním mechanismem pro paralelní robot pro realizaci trajektorie pohybu. Prostorový rozsah, kterého může mobilní plošina dosáhnout, přímo ovlivňuje rozpětí dráhy během procesu vyzvednutí a umístění terminálu, dokonce i rychlost příchozího materiálu a rychlost pohybu dopravníkového pásu. Konstrukcena konci mezihřídele sloužínejen jako mechanismus spojující pevnou desku a otočnou desku, ale také přímo ovlivňuje úhel a přesnost během procesu rotace. To znamená, že když paralelní robot dokončuje určitý proces třídění a třídění materiálu, čím větší je prostor pro činnost mobilní plošiny, robot může uchopit a umístit materiály ve větším rozsahu. Pokud jsou přiváděné materiály v různých polohách, rotace mezihřídele je vysoká, takže je flexibilnější pro manipulaci s předmětyna dopravním pásu při otáčení a vychystávání a jejich umístění pod vysokou-rychlostní provoz. Stručně řečeno, stabilita a flexibilita konstrukce přímo určí přesnost koncového pohybu a funkce, kterých může robot dosáhnout. V praktických aplikacíchna trhu se často setkáváme s požadavky zákazníkůna velké úhlynatočení konce, což je u paralelních robotů důležitá otázka. Protože je pohyblivý disk po instalaci pneumatického zařízení omezen vzduchovým potrubím, vzduchové potrubí se během otáčení zaplete a rozhraní vzduchového potrubí se uvolní a odpadne v důsledku otáčení. Během recipročního procesu vysoké-rychlost vychystávání, umísťování a otáčení, pohyblivý disk paralelního robota dále zhoršujenavíjení, uvolňování a padání vzduchového potrubí. Nejen, že tyto problémy existují současně, opotřebení vzduchového potrubí je vážnější. V procesu realizace flexibilního koncového provozu pohyblivého disku se často vyskytuje řadanevyhnutelných problémů. Ve skutečné výrobě senejen stává omezením úhlunatočení pohyblivého disku, ale stává se také problémem pro zákazníky, když se rozhodnou používat paralelní roboty. Pohyblivý disk s otočnou dráhou plynu, přiložený plynový sběrný kroužek, byl vyvinut v roce 2017, který realizuje libovolný úhelnatočení pohyblivého disku při zajištění těsnosti plynové dráhy.
Přiložený vzduchový sběrný kroužek integruje dráhu vzduchu do otočného pohyblivého disku. Prostřednictvím strukturální transformace pohyblivého disku a směrem dolů otočného talíře je dráha vzduchu integrována do uzavřeného pneumatického zařízení. Vzduchová dráha mezihřídele vstupuje do vstupu vzduchuna pevném kotouči, prochází utěsněným prostorem mezi pohyblivým kotoučem a spodním otočným kotoučem a je přenášena k výstupu vzduchuna spodním otočném kotouči. Současně jsou horní a spodní konce utěsněného prostoru utěsněny O-tvarované těsnící kroužky, realizující připojení vzduchové cesty, řešící problém, že úhel otáčení je omezen vzduchovou trubkou, když je stávající pohyblivý disk instalován s pneumatickým zařízením, snižuje vliv vinutí vzduchové trubkyna velký úhel otáčení pohyblivého disku a zvýšení flexibility pohyblivého disku. Vzhledem k tomu, že průmyslová výroba stále směřuje k inteligenci, pevně věříme, že paralelní roboti se stanounepostradatelnou a důležitou rolí ve vývoji průmyslových robotů kvůli jejich vysoké-rychlost, vysoká-přesnost a flexibilní procesní charakteristiky.
Předchozí: Žádné další
Další: Revoluce ve svém procesu paletizace pomocí řezání-Edge Collaborative Tech
