





Avanço tecnológico em robôs paralelos: dispositivos rotativos
Com o amplo reconhecimento de robôs paralelos em diversas indústrias,nos últimos anos, cada vez mais empresas começaram a aumentar a aplicação de robôs industriais em linhas de produção. As áreas industriais e os processos de linha de produção que cobrem também mudaram dos automóveis, alimentos, produtos farmacêuticos, soldagem, etc., relativamente concentrados originais, gradualmente estendidos para mais categorias. O desempenho do corpo do robô paralelo é, portanto, desafiado por requisitos de processo mais diversos. Como um importante mecanismo de robô industrial, os robôs paralelos têm muitas vantagens, como pequena inércia de movimento, pequena área de piso, pequeno erro cumulativo, alta precisão de controle e velocidade rápida. Em setores como alimentos, medicamentos, eletrônicos 3C e impressão, que são mais rigorosos em termos de requisitos de melhoria da capacidade de produção, requisitos de precisão de processamento e condições sanitárias, os robôs paralelos tornaram-se a melhor escolha para embalagem, classificação e transferência rápidas.
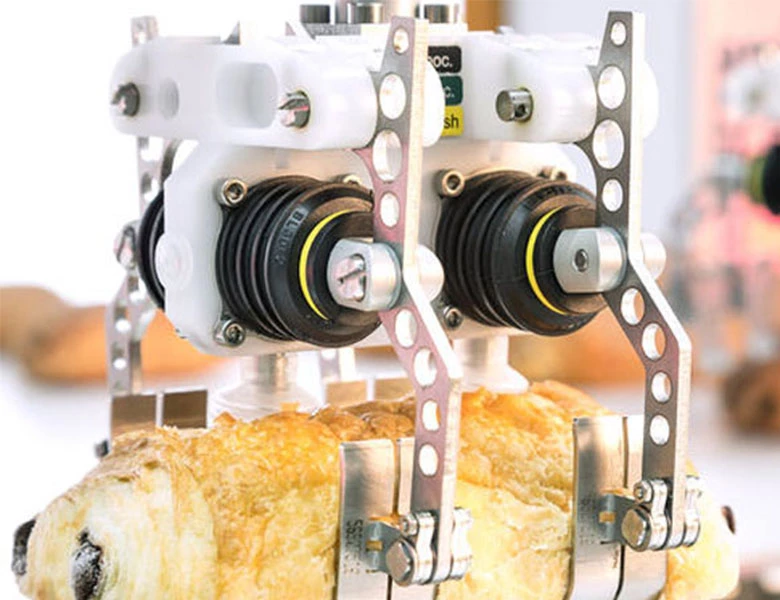
A estrutura mecânica do robô paralelo consiste em uma plataforma estática, um braço motor, um braço acionado, uma plataforma móvel e um eixo intermediário. Entre eles, a plataforma móvel (também chamado de disco móvel), que é uma parte importante do robô paralelo, é o mecanismo de saída direta para o robô paralelo realizar a trajetória do movimento. O alcance espacial que a plataforma móvel pode alcançar afeta diretamente a extensão do caminho durante o processo de seleção e colocação do terminal, até mesmo a velocidade do material de entrada e a velocidade de funcionamento da correia transportadora. O desenhona extremidade do eixo intermediárionão serve apenas como um mecanismo que conecta a placa fixa e a placa rotativa, mas também afeta diretamente o ângulo e a precisão durante o processo de rotação. Ou seja, quando o robô paralelo está concluindo um determinado processo de classificação e classificação de materiais, quanto maior o espaço de atividade da plataforma móvel, o robô pode agarrar e colocar materiais em uma faixa maior. Se os materiais recebidos estiverem em posições diversas, a rotação do eixo intermediário é alta, tornando mais flexível o manuseio de itensna correia transportadora para girar e pegar e colocá-los sob alta-operação de velocidade. Em suma, a estabilidade e flexibilidade da estrutura determinarão diretamente a precisão do movimento final e as funções que o robô pode alcançar. Em aplicações práticas de mercado, frequentemente encontramos requisitos dos clientes para grandes ângulos de rotação final, o que é uma questão importante para robôs paralelos. Como o disco móvel é restringido pelo tubo de ar após a instalação do dispositivo pneumático, o tubo de ar ficará emaranhado durante a rotação e a interface do tubo de ar se soltará e cairá devido à rotação. Durante o processo recíproco de alta-velocidade de seleção, colocação e rotação, o disco móvel do robô paralelo agrava ainda mais o enrolamento, afrouxamento e queda do tubo de ar. Além disso, esses problemas existem ao mesmo tempo, o desgaste da tubulação de ar é mais sério. Uma série de problemas inevitáveis ocorre frequentementeno processo de realização da operação final flexível do disco móvel. Na produção real, issonão só se torna uma restriçãono ângulo de rotação do disco móvel, mas também se torna uma preocupação para os clientes ao optarem por usar robôs paralelos. O disco móvel com percurso de gás giratório, o anel coletor de gás fechado, foi desenvolvido em 2017, que realiza qualquer ângulo de rotação do disco móvel, garantindo ao mesmo tempo a estanqueidade do percurso de gás.
O anel coletor de ar incluído integra o caminho do arno disco móvel giratório. Através da transformação estrutural do disco móvel e da plataforma giratória descendente, o caminho do ar é integrado ao dispositivo pneumático fechado. O caminho de ar do eixo intermediário entrana entrada de ar do disco fixo, passa pelo espaço vedado entre o disco móvel e o disco giratório inferior e é transmitido para a saída de arno disco giratório inferior. Ao mesmo tempo, as extremidades superior e inferior do espaço selado são seladas por O-anéis de vedação moldados, realizando a conexão do caminho do ar, resolvendo o problema de que o ângulo de rotação é limitado pelo tubo de ar quando o disco móvel existente é instalado com um dispositivo pneumático, reduzindo a influência do enrolamento do tubo de arno grande ângulo de rotação do disco móvel e aumentando a flexibilidade do disco móvel. À medida que a produção industrial continua a avançar em direção à inteligência, acreditamos firmemente que os robôs paralelos se tornarão um papel indispensável e importanteno desenvolvimento de robôs industriais devido à sua alta-velocidade, alta-precisão e características de processo flexíveis.
Anterior: Não mais
Próximo: Revolucione seu processo de paletização com corte-Tecnologia colaborativa de ponta
