





Технологичен пробив в паралелните роботи: въртящи се устройства
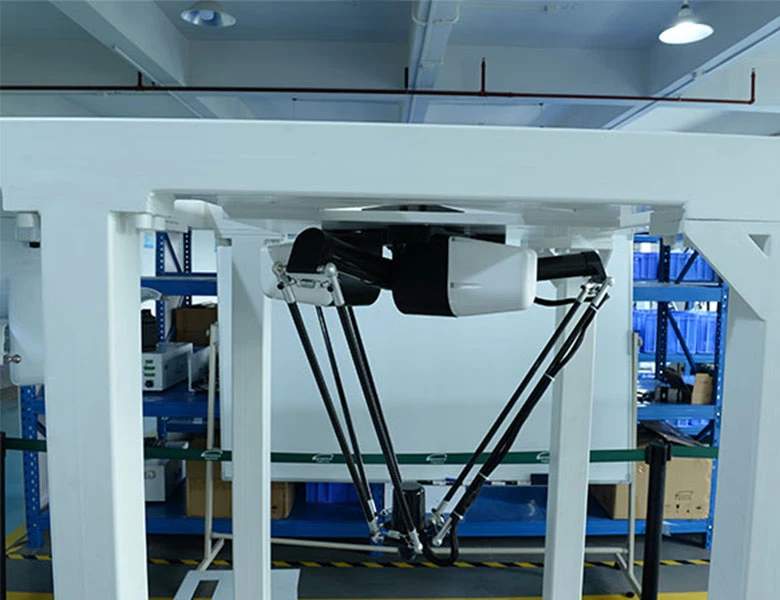
С широкото признание на паралелните роботи в различни индустрии през последните години все повече компании започнаха да увеличават приложението на индустриални роботи в производствените линии. Областите на промишлеността и процесите на производствените линии, които те покриват, също се изместиха от първоначалните сравнително концентрирани автомобили, храни, фармацевтични продукти, заваряване и т.н., постепенно разширени към повече категории. Следователно производителността на тялото на паралелния робот е предизвикана от по-разнообразни изисквания на процеса. Като важен промишлен робот механизъм, паралелните роботи имат много предимства като малка инерция на движение, малка подова площ, малка кумулативна грешка, висока точност на управление и висока скорост. В индустрии като храна, медицина, 3C електроника и печат, които са по-строги по отношение на изискванията за подобряване на производствения капацитет, изискванията за точност на обработката и санитарните условия, паралелните роботи се превърнаха в най-добрия избор за бързо опаковане, сортиране и трансфер.
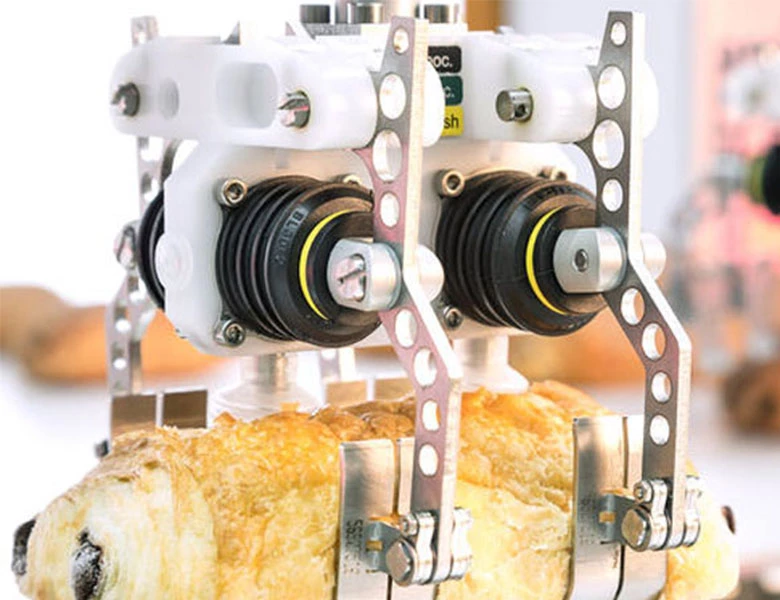
Механичната структура на паралелния робот се състои от статична платформа, задвижващо рамо, задвижвано рамо, подвижна платформа и междинен вал. Сред тях подвижната платформа (наричан още подвижен диск), който е важна част от паралелния робот, е директният изходен механизъм за паралелния робот за реализиране на траекторията на движение. Пространственият обхват, който мобилната платформа може да достигне, влияе директно върху обхвата на пътя по време на процеса на избиране и поставяне на терминала, дори скоростта на входящия материал и скоростта на движение на конвейерната лента. Дизайнът в края на междинния вал служи не само като механизъм, свързващ неподвижната плоча и въртящата се плоча, но също така пряко влияе върху ъгъла и точността по време на процеса на въртене. Тоест, когато паралелният робот завършва определен процес на сортиране и сортиране на материали, колкото по-голямо е пространството за активност на мобилната платформа, роботът може да грабва и поставя материали в по-голям диапазон. Ако входящите материали са в различни позиции, въртенето на междинния вал е високо, което го прави по-гъвкав за обработка на артикули върху конвейерната лента, за да се върти и да ги бране и поставя под високи-скоростна работа. Накратко, стабилността и гъвкавостта на структурата ще определят директно точността на крайното движение и функциите, които роботът може да постигне. В практическите пазарни приложения често срещаме изисквания на клиентите за големи ъгли на крайно завъртане, което е важен проблем за паралелните роботи. Тъй като подвижният диск е ограничен от въздушната тръба след инсталиране на пневматичното устройство, въздушната тръба ще се заплита по време на въртенето и интерфейсът на въздушната тръба ще се разхлаби и ще падне поради въртене. По време на възвратно-постъпателния процес на високо-бързо бране, поставяне и въртене, подвижният диск на паралелния робот допълнително утежнява навиването, разхлабването и падането на въздушната тръба. Не само това, тези проблеми съществуват едновременно, износването на въздуховода е по-сериозно. Серия от неизбежни проблеми възникват често в процеса на реализиране на гъвкава крайна работа на подвижния диск. В реалното производство това не само се превръща в ограничение за ъгъла на въртене на подвижния диск, но също така се превръща в проблем за клиентите, когато избират да използват паралелни роботи. Подвижният диск с въртящ се газов път, затвореният газов контактен пръстен, е разработен през 2017 г., който реализира всеки ъгъл на въртене на подвижния диск, като същевременно осигурява плътността на газовия път.
Включеният въздушен плъзгащ пръстен интегрира въздушния път във въртящия се подвижен диск. Чрез структурна трансформация на подвижния диск и въртящата се надолу въртяща се маса въздушният път е интегриран в затвореното пневматично устройство. Пътят на въздуха на междинния вал навлиза във входа за въздух на неподвижния диск, преминава през уплътненото пространство между подвижния диск и долния въртящ се диск и се предава към изхода за въздух на долния въртящ се диск. В същото време горният и долният край на запечатаното пространство са запечатани с O-профилни уплътнителни пръстени, реализиращи връзката на въздушния път, решаване на проблема, че ъгълът на въртене е ограничен от въздушната тръба, когато съществуващият подвижен диск е монтиран с пневматично устройство, намалявайки влиянието на намотката на въздушната тръба върху големия ъгъл на въртене на подвижния диск и увеличаване на гъвкавостта на подвижния диск. Тъй като промишленото производство продължава да се движи към интелигентност, ние твърдо вярваме, че паралелните роботи ще се превърнат в незаменима и важна роля в развитието на промишлените роботи поради тяхната висока-скорост, висока-прецизност и гъвкави характеристики на процеса.
Предишен: Няма повече
Следваща: Революционизирайте своя процес на палетизиране с рязане-Edge Collaborative Tech
