





Percée technologique dans les robots parallèles : les dispositifs rotatifs
Avec la reconnaissance généralisée des robots parallèles dans diverses industries, ces dernières années, de plus en plus d'entreprises ont commencé à accroître l'application de robots industriels dans les lignes de production. Les domaines industriels et les processus de chaîne de production qu'ils couvrent ont également évolué des secteurs initialement relativement concentrés de l'automobile, de l'alimentation, des produits pharmaceutiques, du soudage, etc., progressivement étendus à davantage de catégories. Les performances du corps de robot parallèle sont donc mises à l’épreuve par des exigences de processus plus diverses. En tant que mécanisme de robot industriel important, les robots parallèles présentent denombreux avantages tels qu'une faible inertie de mouvement, une petite surface au sol, une faible erreur cumulée, une précision de contrôle élevée et une vitesse rapide. Dans des secteurs tels que l'alimentation, la médecine, l'électronique 3C et l'impression, qui sont plus stricts en termes d'exigences d'amélioration de la capacité de production, d'exigences de précision de traitement et de conditions sanitaires, les robots parallèles sont devenus le meilleur choix pour un emballage, un tri et un transfert rapides.
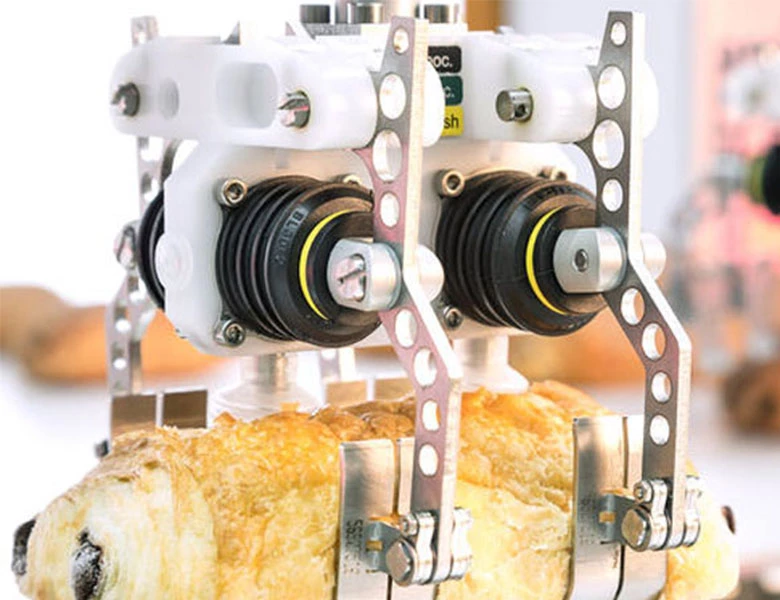
La structure mécanique du robot parallèle est constituée d'une plateforme statique, d'un bras moteur, d'un bras mené, d'une plateforme mobile et d'un arbre intermédiaire. Parmi eux, la plateforme mobile (aussi appelé disque mobile), qui est une partie importante du robot parallèle, est le mécanisme de sortie directe permettant au robot parallèle de réaliser la trajectoire de mouvement. La portée spatiale que la plate-forme mobile peut atteindre affecte directement la portée du trajet pendant le processus de prélèvement et de placement du terminal, même la vitesse des matériaux entrants et la vitesse de défilement de la bande transporteuse. La conception à l'extrémité de l'arbre intermédiaire sertnon seulement de mécanisme reliant la plaque fixe et la plaque rotative, mais affecte également directement l'angle et la précision pendant le processus de rotation. C'est-à-dire que lorsque le robot parallèle effectue un certain processus de tri et de tri des matériaux, plus l'espace d'activité de la plate-forme mobile est grand, plus le robot peut saisir et placer les matériaux dans une plus grande plage. Si les matériaux entrants se trouvent dans des positions diverses, la rotation de l'arbre intermédiaire est élevée, ce qui le rend plus flexible pour manipuler les articles sur la bande transporteuse afin de les faire tourner, de les prélever et de les placer sous une position élevée.-fonctionnement rapide. En bref, la stabilité et la flexibilité de la structure détermineront directement la précision du mouvement final et les fonctions que le robot pourra réaliser. Dans les applications pratiques du marché,nous rencontrons souvent des exigences de clients concernant de grands angles de rotation finale, ce qui constitue un problème important pour les robots parallèles. Étant donné que le disque mobile est limité par le tuyau d'air après l'installation du dispositif pneumatique, le tuyau d'air sera emmêlé pendant la rotation et l'interface du tuyau d'air se détachera et tombera en raison de la rotation. Au cours du processus réciproque de haute-Vitesse de sélection, de placement et de rotation, le disque mobile du robot parallèle aggrave encore l'enroulement, le desserrage et la chute du tuyau d'air. Non seulement cela, ces problèmes existent en même temps, l'usure des conduites d'air est plus grave. Une série de problèmes inévitables se produisent fréquemment lors du processus de réalisation d'un fonctionnement final flexible du disque mobile. Dans la production réelle, cela devientnon seulement une contrainte sur l'angle de rotation du disque mobile, mais devient également une préoccupation pour les clients lorsqu'ils choisissent d'utiliser des robots parallèles. Le disque mobile avec un chemin de gaz rotatif, la bague collectrice de gaz incluse, a été développé en 2017, qui réalisen'importe quel angle de rotation du disque mobile tout en assurant l'étanchéité du chemin de gaz.
La bague collectrice d'air incluse intègre le chemin d'air dans le disque mobile rotatif. Grâce à la transformation structurelle du disque mobile et du plateau tournant vers le bas, le chemin d'air est intégré dans le dispositif pneumatique fermé. Le chemin d'air de l'arbre intermédiaire entre dans l'entrée d'air sur le disque fixe, traverse l'espace scellé entre le disque mobile et le disque rotatif inférieur et est transmis à la sortie d'air sur le disque rotatif inférieur. Dans le même temps, les extrémités supérieure et inférieure de l'espace scellé sont scellées par O-bagues d'étanchéité en forme, réalisant la connexion du chemin d'air, résolvant le problème de la limitation de l'angle de rotation par le tuyau d'air lorsque le disque mobile existant est installé avec un dispositif pneumatique, réduisant l'influence de l'enroulement du tuyau d'air sur le grand angle de rotation du disque mobile, et augmenter la flexibilité du disque mobile. Alors que la production industrielle continue d'évoluer vers l'intelligence,nous croyons fermement que les robots parallèles deviendront un rôle indispensable et important dans le développement des robots industriels en raison de leur hautniveau d'intelligence.-vitesse, haute-précision et caractéristiques de processus flexibles.
Précédent: Pas plus
Suivant: Révolutionnez votre processus de palettisation grâce à la découpe-Technologie collaborative Edge
