





パラレルロボットの技術的進歩:回転装置
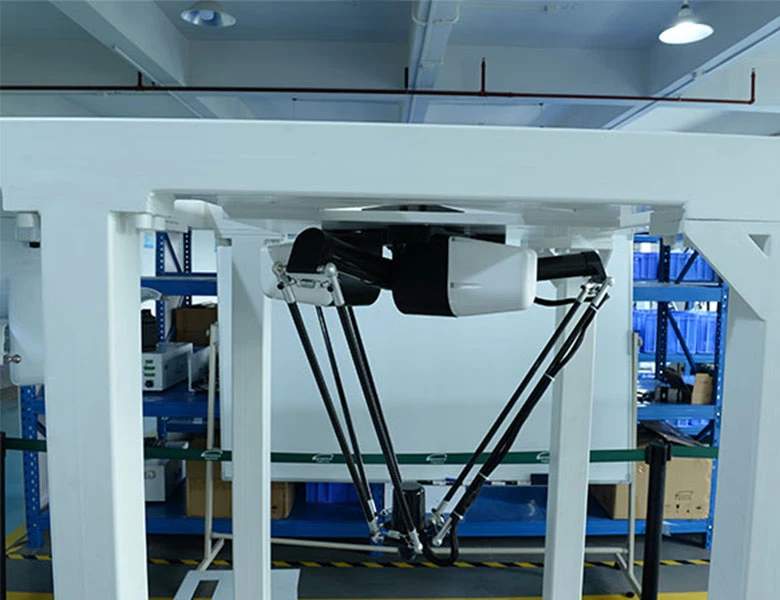
近年、パラレルロボットがさまざまな業界で認知されるようになり、生産ラインへの産業用ロボットの導入を拡大する企業が増えています。対象となる産業分野や生産ラインのプロセスも、当初は比較的集中していた自動車、食品、医薬品、溶接などから、徐々により多くのカテゴリーに拡大してきました。したがって、パラレルロボット本体の性能は、より多様なプロセス要件によって挑戦されます。産業用ロボットの重要な機構として、パラレルロボットは、動作慣性が小さく、床面積が小さく、累積誤差が小さく、制御精度が高く、速度が速いなどの多くの利点があります。食品、医薬品、3Cエレクトロニクス、印刷など、生産能力の向上要求、加工精度要求、衛生条件の点で厳しい業界では、パラレルロボットが迅速な包装、仕分け、搬送に最適な選択肢となっています。
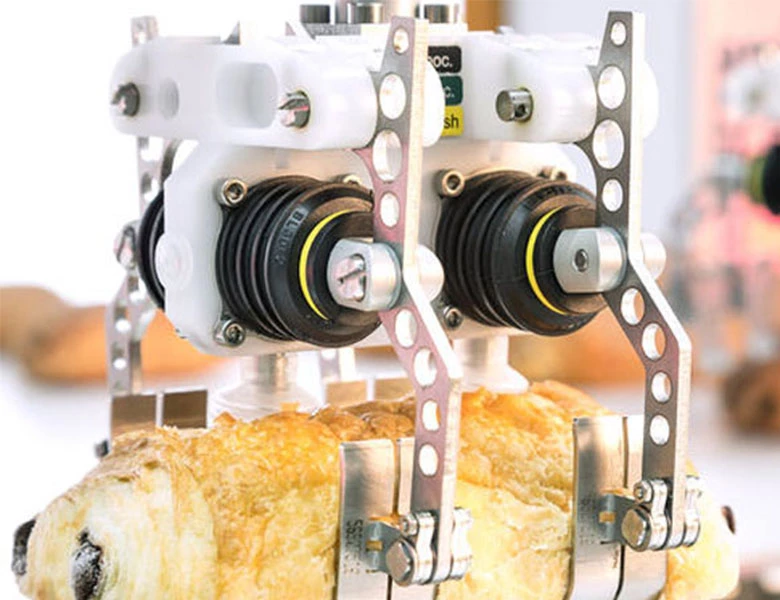
パラレルロボットの機械構造は、静止プラットフォーム、駆動アーム、従動アーム、移動プラットフォーム、中間シャフトで構成されます。その中でも移動プラットフォームは、 (可動ディスクとも呼ばれます)パラレルロボットの重要な部分である、パラレルロボットが動作軌道を実現するための直接出力機構です。モバイル プラットフォームが到達できる空間範囲は、端子のピック アンド プレース プロセス中の経路スパン、さらには搬入される材料の速度やコンベア ベルトの走行速度に直接影響します。中間軸先端のデザインは、固定プレートと回転プレートを接続する機構として機能するだけでなく、回転時の角度や精度にも直接影響します。つまり、パラレルロボットが特定の選別および材料選別プロセスを完了するとき、移動プラットフォームの活動スペースが大きいほど、ロボットはより広い範囲で材料をつかんで配置することができます。入ってくる材料がさまざまな位置にある場合、中間シャフトの回転が速くなり、回転するコンベアベルト上のアイテムの取り扱いや、高い位置でアイテムをピッキングして配置することがより柔軟になります。-スピード操作。つまり、構造の安定性と柔軟性が、ロボットが達成できるエンドモーションの精度と機能を直接決定します。実際の市場アプリケーションでは、大きな端部回転角度に対する顧客の要件に遭遇することがよくありますが、これはパラレル ロボットにとって重要な問題です。空圧機器を取り付けた後は、可動ディスクがエアパイプに拘束されるため、回転中にエアパイプが絡まり、エアパイプの界面が回転により緩んで脱落する可能性があります。高速往復過程中-パラレルロボットの可動ディスクは、ピッキング、配置、回転の速度が速いため、エアパイプの曲がり、緩み、落下をさらに悪化させます。それだけではなく、これらの問題も同時に存在しており、エアパイプの磨耗はより深刻です。可動ディスクの柔軟な端部動作を実現する過程において、避けられない一連の問題が頻繁に発生する。実際の生産においては、可動ディスクの回転角度の制約となるだけでなく、パラレルロボットの使用を選択する際にもお客様の懸念事項となります。 2017年に回転可能なガス流路を備えた可動ディスク「密閉型ガススリップリング」を開発し、ガス流路の密閉性を確保しながら可動ディスクの任意の回転角度を実現しました。
密閉されたエアスリップリングは、回転可能な可動ディスクに空気経路を統合します。可動ディスクと下向きに回転するターンテーブルの構造変形により、空気経路が密閉空圧装置に統合されます。中間軸の空気経路は、固定ディスクの空気入口から入り、可動ディスクと下部回転ディスクの間の密閉空間を通過し、下部回転ディスクの空気出口に伝達されます。同時に密閉空間の上下端をOにより密閉します。-形状のシールリングにより、エア経路の接続を実現、既存の可動ディスクに空圧機器を取り付けた場合にエアパイプによって回転角度が制限される問題を解決し、大きな回転角に対するエアパイプの巻きの影響を軽減します可動ディスクの柔軟性を向上させます。工業生産のインテリジェンス化が進む中、パラレルロボットはその高い性能により、産業用ロボットの開発において不可欠かつ重要な役割を果たすと当社は確信しています。-スピード、高速-精度と柔軟なプロセス特性。
前の: もうない
