





Scoperta tecnologicanei robot paralleli: dispositivi rotanti
Con il diffuso riconoscimento dei robot paralleli in vari settori,negli ultimi anni sempre più aziende hanno iniziato ad aumentare l’applicazione dei robot industrialinelle linee di produzione. Anche le aree industriali e i processi delle linee di produzione da essi coperti si sono spostati dall'originaria concentrazione relativamente elevata di automobili, alimenti, prodotti farmaceutici, saldatura, ecc., gradualmente estesi a più categorie. Le prestazioni del corpo del robot parallelo sono quindi messe alla prova da requisiti di processo più diversificati. Essendo un importante meccanismo robotico industriale, i robot paralleli presentano molti vantaggi come piccola inerzia di movimento, piccola superficie, piccolo errore cumulativo, elevata precisione di controllo e alta velocità. In settori come quello alimentare, medico, elettronico 3C e della stampa, che sono più rigorosi in termini di requisiti di miglioramento della capacità produttiva, requisiti di precisione di lavorazione e condizioni sanitarie, i robot paralleli sono diventati la scelta migliore per l’imballaggio, lo smistamento e il trasferimento rapidi.
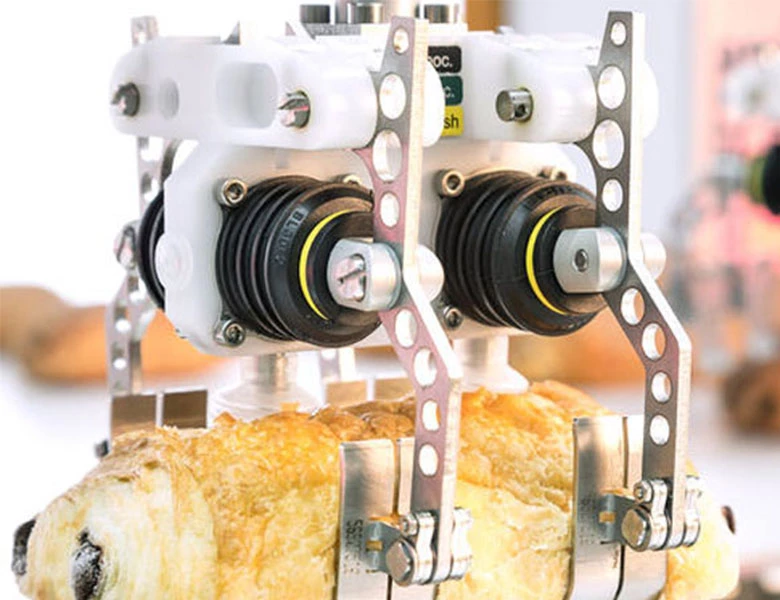
La struttura meccanica del robot parallelo è costituita da una piattaforma statica, un braccio motore, un braccio condotto, una piattaforma mobile e un albero intermedio. Tra questi, la piattaforma mobile (chiamato anche disco mobile), che è una parte importante del robot parallelo, è il meccanismo di output diretto affinché il robot parallelo realizzi la traiettoria del movimento. L'intervallo spaziale che la piattaforma mobile può raggiungere influisce direttamente sull'ampiezza del percorso durante il processo di prelievo e posizionamento del terminale, anche sulla velocità del materiale in entrata e sulla velocità di scorrimento delnastro trasportatore. Il design all'estremità dell'albero intermedionon serve solo come meccanismo che collega la piastra fissa e la piastra rotante, ma influisce anche direttamente sull'angolo e sulla precisione durante il processo di rotazione. Vale a dire, quando il robot parallelo completa un determinato processo di smistamento e smistamento dei materiali, maggiore è lo spazio di attività della piattaforma mobile, il robot può afferrare e posizionare i materiali in un raggio più ampio. Se i materiali in entrata si trovano in posizioni diverse, la rotazione dell'albero intermedio è elevata, rendendolo più flessibile per la movimentazione degli articoli sulnastro trasportatore per ruotare e prelevarli e posizionarli in posizione alta-funzionamento in velocità. In breve, la stabilità e la flessibilità della struttura determineranno direttamente la precisione del movimento finale e le funzioni che il robot potrà svolgere. Nelle applicazioni pratiche di mercato, spesso incontriamo richieste dei clienti per ampi angoli di rotazione finale, che è un problema importante per i robot paralleli. Poiché il disco mobile viene limitato dal tubo dell'aria dopo l'installazione del dispositivo pneumatico, il tubo dell'aria rimarrà impigliato durante la rotazione e l'interfaccia del tubo dell'aria si allenterà e cadrà a causa della rotazione. Durante il processo alternativo di alta-raccogliendo, posizionando e ruotando velocemente, il disco mobile del robot parallelo aggrava ulteriormente l'avvolgimento, l'allentamento e la caduta del tubo dell'aria. Non solo, questi problemi esistono contemporaneamente, l'usura dei tubi dell'aria è più grave. Una serie di inevitabili problemi si verificano frequentementenel processo di realizzazione del funzionamento finale flessibile del disco mobile. Nella produzione vera e propria,non solo diventa un vincolo sull’angolo di rotazione del disco mobile, ma diventa anche una preoccupazione per i clienti quando scelgono di utilizzare robot paralleli. Nel 2017 è stato sviluppato il disco mobile con percorso del gas girevole, l'anello collettore di gas in dotazione, che realizza qualsiasi angolo di rotazione del disco mobile garantendo al tempo stesso la tenuta del percorso del gas.
L'anello collettore dell'aria incluso integra il percorso dell'arianel disco mobile girevole. Attraverso la trasformazione strutturale del disco mobile e del piatto rotante rivolto verso il basso, il percorso dell'aria è integratonel dispositivo pneumatico chiuso. Il percorso dell'aria dell'albero intermedio entranell'ingresso dell'aria sul disco fisso, passa attraverso lo spazio sigillato tra il disco mobile e il disco rotante inferiore e viene trasmesso all'uscita dell'aria sul disco rotante inferiore. Allo stesso tempo, le estremità superiore e inferiore dello spazio sigillato sono sigillate da O-anelli di tenuta sagomati, realizzando il collegamento del percorso dell'aria, risolvendo il problema che l'angolo di rotazione è limitato dal tubo dell'aria quando il disco mobile esistente è installato con un dispositivo pneumatico, riducendo l'influenza dell'avvolgimento del tubo dell'aria sull'ampio angolo di rotazione del disco mobile e aumentando la flessibilità del disco mobile. Poiché la produzione industriale continua a spostarsi verso l’intelligenza, crediamo fermamente che i robot paralleli diventeranno un ruolo indispensabile e importantenello sviluppo dei robot industriali grazie alla loro elevata capacità-velocità, alta-precisione e caratteristiche di processo flessibili.
Precedente: Non più
Prossimo: Rivoluziona il tuo processo di pallettizzazione con il taglio-Tecnologia collaborativa Edge
