





Τεχνολογική ανακάλυψη στα παράλληλα ρομπότ: περιστρεφόμενες συσκευές
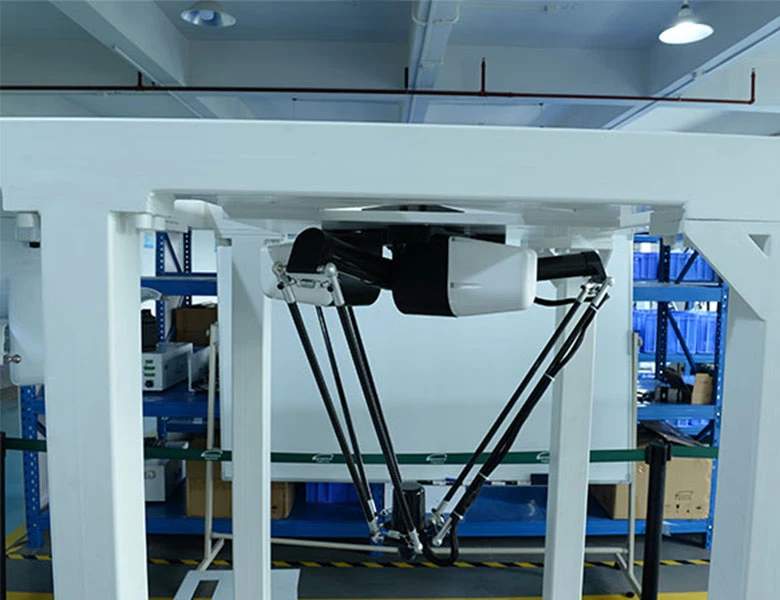
Με την ευρεία αναγνώριση των παράλληλων ρομπότ σε διάφορες βιομηχανίες, τα τελευταία χρόνια, όλο και περισσότερες εταιρείες έχουν αρχίσει να αυξάνουν την εφαρμογή βιομηχανικών ρομπότ στις γραμμές παραγωγής. Οι τομείς της βιομηχανίας και οι διεργασίες γραμμής παραγωγής που καλύπτουν έχουν επίσης μετατοπιστεί από τα αρχικά σχετικά συγκεντρωμένα αυτοκίνητα, τρόφιμα, φαρμακευτικά προϊόντα, συγκόλληση κ.λπ., σταδιακά επεκτείνονται σε περισσότερες κατηγορίες. Ως εκ τούτου, η απόδοση του παράλληλου σώματος ρομπότ αμφισβητείται από πιο διαφορετικές απαιτήσεις διαδικασίας. Ως σημαντικός βιομηχανικός μηχανισμός ρομπότ, τα παράλληλα ρομπότ έχουν πολλά πλεονεκτήματα όπως μικρή αδράνεια κίνησης, μικρή επιφάνεια δαπέδου, μικρό σωρευτικό σφάλμα, υψηλή ακρίβεια ελέγχου και γρήγορη ταχύτητα. Σε βιομηχανίες όπως τα τρόφιμα, τα φάρμακα, τα ηλεκτρονικά 3C και η εκτύπωση που είναι πιο αυστηρές όσον αφορά τις απαιτήσεις βελτίωσης της παραγωγικής ικανότητας, τις απαιτήσεις ακρίβειας επεξεργασίας και τις συνθήκες υγιεινής, τα παράλληλα ρομπότ έχουν γίνει η καλύτερη επιλογή για γρήγορη συσκευασία, ταξινόμηση και μεταφορά.
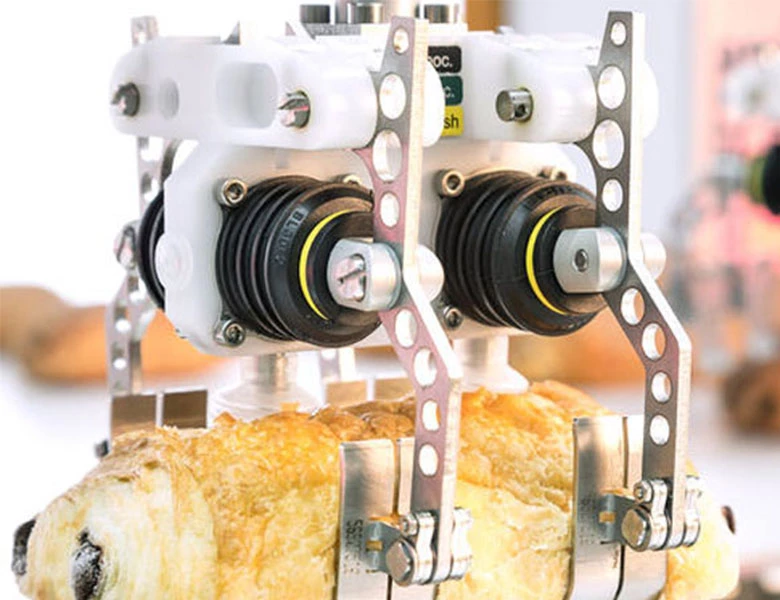
Η μηχανική δομή του παράλληλου ρομπότ αποτελείται από μια στατική πλατφόρμα, έναν κινητήριο βραχίονα, έναν κινούμενο βραχίονα, μια κινούμενη πλατφόρμα και έναν ενδιάμεσο άξονα. Ανάμεσά τους, η κινούμενη πλατφόρμα (ονομάζεται επίσης κινητός δίσκος), που είναι ένα σημαντικό μέρος του παράλληλου ρομπότ, είναι ο μηχανισμός άμεσης εξόδου για να πραγματοποιήσει το παράλληλο ρομπότ την τροχιά κίνησης. Το χωρικό εύρος που μπορεί να φτάσει η κινητή πλατφόρμα επηρεάζει άμεσα το εύρος διαδρομής κατά τη διαδικασία επιλογής και τοποθέτησης του τερματικού, ακόμη και την ταχύτητα εισερχόμενου υλικού και την ταχύτητα κίνησης του μεταφορικού ιμάντα. Ο σχεδιασμός στο άκρο του ενδιάμεσου άξονα όχι μόνο χρησιμεύει ως μηχανισμός που συνδέει τη σταθερή πλάκα και την περιστρεφόμενη πλάκα, αλλά επίσης επηρεάζει άμεσα τη γωνία και την ακρίβεια κατά τη διαδικασία περιστροφής. Δηλαδή, όταν το παράλληλο ρομπότ ολοκληρώνει μια συγκεκριμένη διαδικασία ταξινόμησης και ταξινόμησης υλικών, όσο μεγαλύτερος είναι ο χώρος δραστηριότητας της κινητής πλατφόρμας, το ρομπότ μπορεί να αρπάξει και να τοποθετήσει υλικά σε μεγαλύτερο εύρος. Εάν τα εισερχόμενα υλικά βρίσκονται σε διαφορετικές θέσεις, η περιστροφή του ενδιάμεσου άξονα είναι υψηλή, καθιστώντας τον πιο ευέλικτο για το χειρισμό αντικειμένων στον μεταφορικό ιμάντα να περιστρέφονται και να μαζεύουν και να τα τοποθετούν κάτω από ψηλά-ταχύτητα λειτουργίας. Εν ολίγοις, η σταθερότητα και η ευελιξία της δομής θα καθορίσουν άμεσα την ακρίβεια της τελικής κίνησης και τις λειτουργίες που μπορεί να επιτύχει το ρομπότ. Σε πρακτικές εφαρμογές της αγοράς, συναντάμε συχνά απαιτήσεις πελατών για μεγάλες γωνίες περιστροφής των άκρων, κάτι που είναι σημαντικό ζήτημα για τα παράλληλα ρομπότ. Επειδή ο κινητός δίσκος περιορίζεται από τον σωλήνα αέρα μετά την εγκατάσταση της πνευματικής συσκευής, ο σωλήνας αέρα θα μπερδευτεί κατά την περιστροφή και η διεπαφή του σωλήνα αέρα θα χαλαρώσει και θα πέσει λόγω περιστροφής. Κατά την παλινδρομική διαδικασία του υψηλού-επιλογή ταχύτητας, τοποθέτηση και περιστροφή, ο κινητός δίσκος του παράλληλου ρομπότ επιδεινώνει περαιτέρω την περιέλιξη, τη χαλάρωση και την πτώση του σωλήνα αέρα. Όχι μόνο αυτό, αυτά τα προβλήματα υπάρχουν ταυτόχρονα, η φθορά του σωλήνα αέρα είναι πιο σοβαρή. Μια σειρά από αναπόφευκτα προβλήματα παρουσιάζονται συχνά κατά τη διαδικασία πραγματοποίησης της ευέλικτης τελικής λειτουργίας του κινητού δίσκου. Στην πραγματική παραγωγή, όχι μόνο γίνεται περιορισμός στη γωνία περιστροφής του κινητού δίσκου, αλλά προκαλεί επίσης ανησυχία για τους πελάτες όταν επιλέγουν να χρησιμοποιήσουν παράλληλα ρομπότ. Ο κινητός δίσκος με περιστρεφόμενη διαδρομή αερίου, ο κλειστός δακτύλιος ολίσθησης αερίου, αναπτύχθηκε το 2017, ο οποίος πραγματοποιεί οποιαδήποτε γωνία περιστροφής του κινητού δίσκου διασφαλίζοντας παράλληλα τη στεγανότητα της διαδρομής αερίου.
Ο κλειστός δακτύλιος ολίσθησης αέρα ενσωματώνει τη διαδρομή αέρα στον περιστρεφόμενο κινητό δίσκο. Μέσω της δομικής μετατροπής του κινητού δίσκου και του προς τα κάτω περιστρεφόμενου περιστρεφόμενου δίσκου, η διαδρομή αέρα ενσωματώνεται στην κλειστή πνευματική συσκευή. Η διαδρομή αέρα του ενδιάμεσου άξονα εισέρχεται στην είσοδο αέρα στον σταθερό δίσκο, διέρχεται από τον σφραγισμένο χώρο μεταξύ του κινητού δίσκου και του κάτω περιστρεφόμενου δίσκου και μεταδίδεται στην έξοδο αέρα στον κάτω περιστρεφόμενο δίσκο. Ταυτόχρονα, το πάνω και το κάτω άκρο του σφραγισμένου χώρου σφραγίζονται με Ο-διαμορφωμένους στεγανοποιητικούς δακτυλίους, συνειδητοποίηση της σύνδεσης της διαδρομής αέρα, επίλυση του προβλήματος ότι η γωνία περιστροφής περιορίζεται από τον σωλήνα αέρα όταν ο υπάρχων κινητός δίσκος είναι εγκατεστημένος με πνευματική συσκευή, μειώνοντας την επίδραση της περιέλιξης του σωλήνα αέρα στη μεγάλη γωνία περιστροφής του κινητού δίσκου και αυξάνοντας την ευελιξία του κινητού δίσκου. Καθώς η βιομηχανική παραγωγή συνεχίζει να κινείται προς την ευφυΐα, πιστεύουμε ακράδαντα ότι τα παράλληλα ρομπότ θα γίνουν απαραίτητος και σημαντικός ρόλος στην ανάπτυξη των βιομηχανικών ρομπότ λόγω του υψηλού τους-ταχύτητα, υψηλή-ακρίβεια και ευέλικτα χαρακτηριστικά διαδικασίας.
Προηγούμενος: Οχι άλλο
Επόμενος: Επανάσταση στη διαδικασία παλετοποίησης με το κόψιμο-Edge Collaborative Tech
