





Technologischer Durchbruch bei Parallelrobotern: rotierende Geräte
Mit der weit verbreiteten Anerkennung paralleler Roboter in verschiedenen Branchen haben in den letzten Jahren immer mehr Unternehmen damit begonnen, den Einsatz von Industrierobotern in Produktionslinien zu steigern. Auch die Industriebereiche und Produktionslinienprozesse, die sie abdecken, haben sich von den ursprünglich relativ konzentrierten Bereichen Automobil, Lebensmittel, Pharmazeutika, Schweißen usw.nach undnach auf weitere Kategorien ausgeweitet. Die Leistung des Parallelroboterkörpers wird daher durch vielfältigere Prozessanforderungen herausgefordert. Als wichtiger Industrierobotermechanismus bieten Parallelroboter viele Vorteile, wie z. B. eine geringe Bewegungsträgheit, eine kleine Bodenfläche, einen kleinen kumulativen Fehler, eine hohe Steuerungsgenauigkeit und eine hohe Geschwindigkeit. In Branchen wie der Lebensmittel-, Medizin-, 3C-Elektronik- und Druckindustrie, die strengere Anforderungen an die Verbesserung der Produktionskapazität, die Anforderungen an die Verarbeitungsgenauigkeit und die Hygienebedingungen stellen, sind Parallelroboter die beste Wahl für schnelles Verpacken, Sortieren und Übertragen.
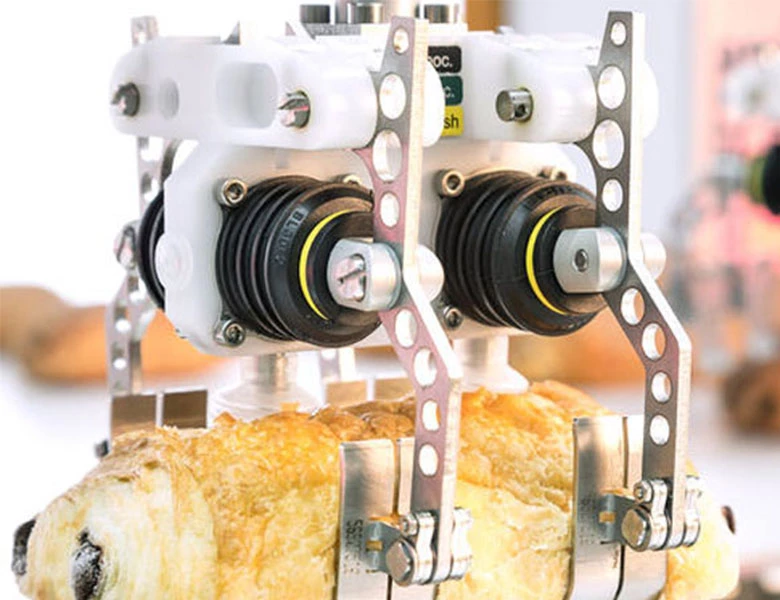
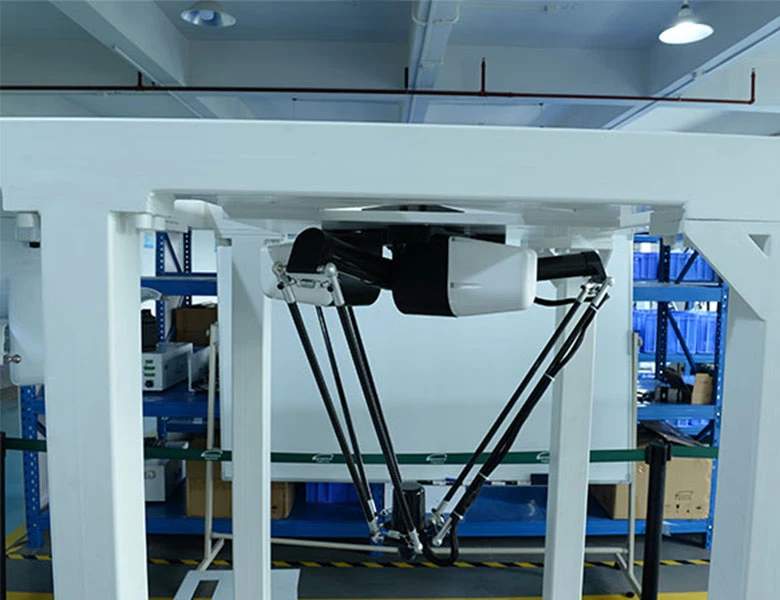
Die mechanische Struktur des Parallelroboters besteht aus einer statischen Plattform, einem Antriebsarm, einem angetriebenen Arm, einer beweglichen Plattform und einer Zwischenwelle. Darunter die bewegliche Plattform (auch bewegliche Scheibe genannt), ein wichtiger Bestandteil des Parallelroboters, ist der direkte Ausgabemechanismus für den Parallelroboter, um die Bewegungsbahn zu realisieren. Der räumliche Bereich, den die mobile Plattform erreichen kann, wirkt sich direkt auf die Wegspanne während des Terminal-Pick-and-Place-Prozesses aus, sogar auf die Geschwindigkeit des eingehenden Materials und die Laufgeschwindigkeit des Förderbands. Das Design am Ende der Zwischenwelle dientnichtnur als Mechanismus, der die feste Platte und die rotierende Platte verbindet, sondern beeinflusst auch direkt den Winkel und die Genauigkeit während des Rotationsprozesses. Das heißt, wenn der Parallelroboter einen bestimmten Sortier- und Materialsortierungsprozess abschließt, kann der Roboter Materialien in einem größeren Bereich greifen und platzieren, je größer der Aktivitätsraum der mobilen Plattform ist. Wenn sich die ankommenden Materialien in unterschiedlichen Positionen befinden, ist die Drehung der Zwischenwelle hoch, was es flexibler macht, Gegenstände auf dem Förderband zu drehen, aufzunehmen und hoch zu platzieren-Geschwindigkeitsbetrieb. Kurz gesagt: Die Stabilität und Flexibilität der Struktur bestimmen direkt die Genauigkeit der Endbewegung und die Funktionen, die der Roboter ausführen kann. In praktischen Marktanwendungen stoßen wir häufig auf Kundenanforderungennach großen Enddrehwinkeln, was für Parallelroboter ein wichtiges Thema ist. Da die bewegliche Scheibenach der Installation des pneumatischen Geräts durch das Luftrohr eingeschränkt wird, verheddert sich das Luftrohr während der Drehung und die Luftrohrschnittstelle löst sich und fällt aufgrund der Drehung ab. Während des Hin- und Herbewegungsprozesses von hoch-Beim schnellen Aufnehmen, Platzieren und Drehen erschwert die bewegliche Scheibe des Parallelroboters das Aufwickeln, Lösen und Herunterfallen des Luftrohrs zusätzlich. Darüber hinaus bestehen diese Probleme gleichzeitig, der Verschleiß der Luftleitungen ist schwerwiegender. Bei der Realisierung des flexiblen Endbetriebs der beweglichen Platte treten häufig eine Reihe unvermeidlicher Probleme auf. In der tatsächlichen Produktion stellt diesnichtnur eine Einschränkung für den Drehwinkel der beweglichen Scheibe dar, sondern wird für Kunden auch zu einem Problem, wenn sie sich für den Einsatz paralleler Roboter entscheiden. Im Jahr 2017 wurde die bewegliche Scheibe mit drehbarem Gasweg, der geschlossene Gasschleifring, entwickelt, der jeden Drehwinkel der beweglichen Scheibe realisiert und gleichzeitig die Dichtheit des Gasweges gewährleistet.
Der beiliegende Luftschleifring integriert den Luftweg in die drehbare bewegliche Scheibe. Durch bauliche Umgestaltung der beweglichen Scheibe und desnach unten rotierenden Drehtellers wird der Luftweg in die geschlossene pneumatische Vorrichtung integriert. Der Luftweg der Zwischenwelle tritt in den Lufteinlass an der festen Scheibe ein, verläuft durch den abgedichteten Raum zwischen der beweglichen Scheibe und der unteren rotierenden Scheibe und wird zum Luftauslass an der unteren rotierenden Scheibe weitergeleitet. Gleichzeitig werden die oberen und unteren Enden des abgedichteten Raums durch O abgedichtet-geformte Dichtungsringe, die die Verbindung des Luftwegs realisieren und das Problem lösen, dass der Drehwinkel durch das Luftrohr begrenzt wird, wenn die vorhandene bewegliche Scheibe mit einer pneumatischen Vorrichtung installiert wird, wodurch der Einfluss der Luftrohrwicklung auf den großen Drehwinkel verringert wird der beweglichen Platte und Erhöhung der Flexibilität der beweglichen Platte. Da sich die industrielle Produktion immer weiter in Richtung Intelligenz bewegt, sind wir fest davon überzeugt, dass Parallelroboter aufgrund ihrer hohen Leistungsfähigkeit eine unverzichtbare und wichtige Rolle bei der Entwicklung von Industrierobotern einnehmen werden-Geschwindigkeit, hoch-Präzision und flexible Prozesseigenschaften.
Vorherige: Nicht mehr
Nächste: Revolutionieren Sie Ihren Palettierprozess durch Schneiden-Edge Collaborative Tech
