





ความก้าวหน้าทางเทคโนโลยีของหุ่นยนต์คู่ขนาน: อุปกรณ์หมุน
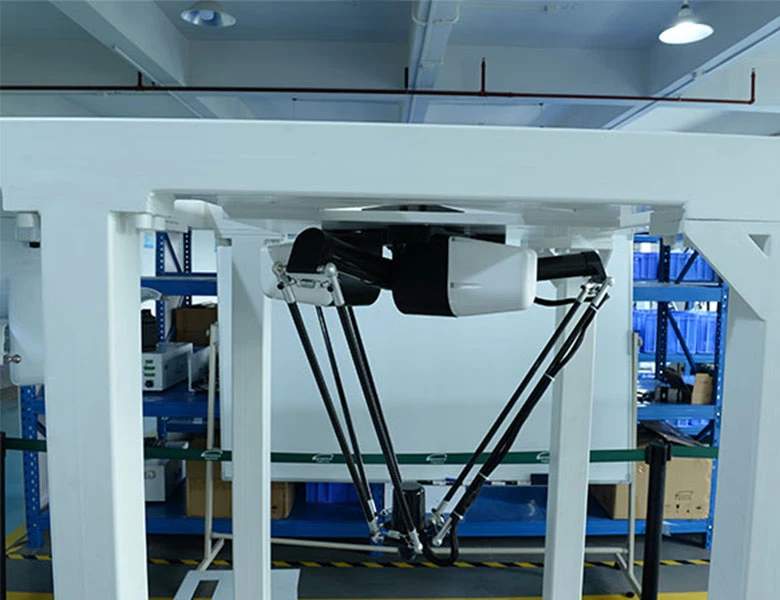
จากการที่หุ่นยนต์คู่ขนานได้รับการยอมรับอย่างกว้างขวางในอุตสาหกรรมต่างๆ ในช่วงไม่กี่ปีที่ผ่านมา บริษัทต่างๆ จำนวนมากขึ้นเรื่อยๆ ได้เริ่มเพิ่มการประยุกต์ใช้หุ่นยนต์อุตสาหกรรมในสายการผลิต พื้นที่อุตสาหกรรมและกระบวนการสายการผลิตที่ครอบคลุมได้เปลี่ยนจากยานยนต์ อาหาร ยา การเชื่อม ฯลฯ ที่ค่อนข้างเข้มข้นแบบเดิม และค่อยๆ ขยายไปยังหมวดหมู่อื่นๆ มากขึ้น ประสิทธิภาพของตัวหุ่นยนต์คู่ขนานจึงถูกท้าทายจากข้อกำหนดกระบวนการที่หลากหลายมากขึ้น ในฐานะกลไกหุ่นยนต์อุตสาหกรรมที่สำคัญ หุ่นยนต์คู่ขนานมีข้อดีหลายประการ เช่น ความเฉื่อยในการเคลื่อนที่ต่ำ พื้นที่พื้นเล็ก ข้อผิดพลาดสะสมเล็กน้อย ความแม่นยำในการควบคุมสูง และความเร็วที่รวดเร็ว ในอุตสาหกรรมต่างๆ เช่น อาหาร ยา อิเล็กทรอนิกส์ 3C และการพิมพ์ที่มีความเข้มงวดมากขึ้นในแง่ของข้อกำหนดในการปรับปรุงกำลังการผลิต ข้อกำหนดด้านความแม่นยำในการประมวลผล และเงื่อนไขด้านสุขอนามัย หุ่นยนต์แบบขนานได้กลายเป็นตัวเลือกที่ดีที่สุดสำหรับการบรรจุ การคัดแยก และการถ่ายโอนอย่างรวดเร็ว
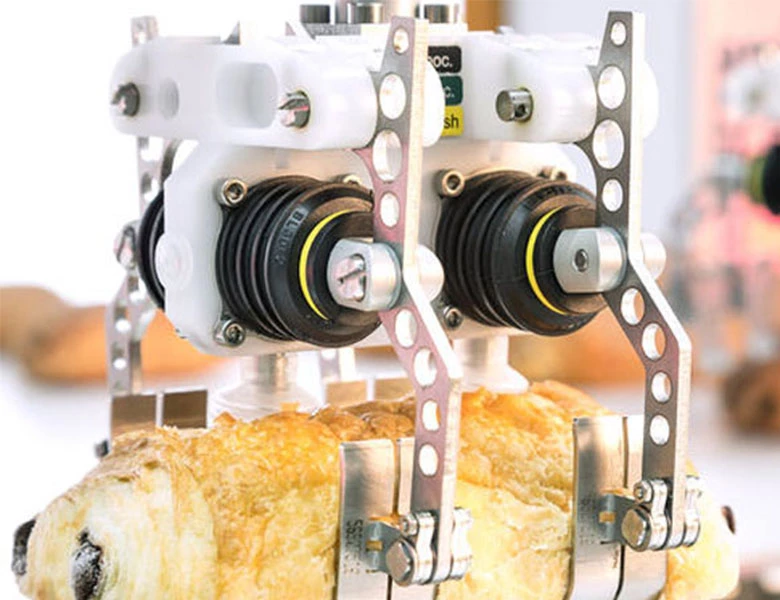
โครงสร้างทางกลของหุ่นยนต์คู่ขนานประกอบด้วยแท่นแบบอยู่กับที่ แขนขับเคลื่อน แขนขับเคลื่อน แท่นเคลื่อนที่ และเพลากลาง ในหมู่พวกเขาแพลตฟอร์มที่เคลื่อนไหว (เรียกอีกอย่างว่าดิสก์ที่เคลื่อนย้ายได้)ซึ่งเป็นส่วนสำคัญของหุ่นยนต์คู่ขนาน คือกลไกเอาท์พุตโดยตรงสำหรับหุ่นยนต์คู่ขนานเพื่อให้ทราบวิถีการเคลื่อนที่ ช่วงเชิงพื้นที่ที่แพลตฟอร์มเคลื่อนที่สามารถเข้าถึงได้ส่งผลโดยตรงต่อช่วงเส้นทางระหว่างกระบวนการหยิบและวางเทอร์มินัล แม้แต่ความเร็วของวัสดุที่เข้ามาและความเร็วในการทำงานของสายพานลำเลียง การออกแบบที่ส่วนท้ายของเพลากลางไม่เพียงแต่ทำหน้าที่เป็นกลไกในการเชื่อมต่อแผ่นยึดกับแผ่นหมุนเท่านั้น แต่ยังส่งผลโดยตรงต่อมุมและความแม่นยำในระหว่างกระบวนการหมุนอีกด้วย กล่าวคือ เมื่อหุ่นยนต์คู่ขนานเสร็จสิ้นกระบวนการคัดแยกและคัดแยกวัสดุ ยิ่งพื้นที่กิจกรรมของแพลตฟอร์มมือถือมีขนาดใหญ่ขึ้น หุ่นยนต์ก็สามารถจับและวางวัสดุในช่วงที่ใหญ่ขึ้นได้ หากวัสดุที่เข้ามาอยู่ในตำแหน่งที่หลากหลาย การหมุนของเพลากลางจะสูง ทำให้มีความยืดหยุ่นมากขึ้นในการขนย้ายสิ่งของบนสายพานลำเลียงเพื่อหมุนและหยิบและวางไว้ใต้ที่สูง-การดำเนินการความเร็ว กล่าวโดยสรุป ความเสถียรและความยืดหยุ่นของโครงสร้างจะกำหนดความแม่นยำของการเคลื่อนที่ส่วนท้ายและฟังก์ชันที่หุ่นยนต์สามารถทำได้โดยตรง ในการใช้งานจริงในตลาด เรามักจะพบกับความต้องการของลูกค้าสำหรับการหมุนปลายมุมที่กว้าง ซึ่งเป็นปัญหาสำคัญสำหรับหุ่นยนต์แบบขนาน เนื่องจากดิสก์ที่เคลื่อนย้ายได้ถูกจำกัดโดยท่อลมหลังจากติดตั้งอุปกรณ์นิวแมติก ท่ออากาศจะพันกันในระหว่างการหมุน และส่วนต่อประสานของท่อลมจะหลวมและหลุดออกเนื่องจากการหมุน ในระหว่างกระบวนการลูกสูบสูง-การเลือกความเร็ว การวาง และการหมุน จานเคลื่อนที่ของหุ่นยนต์คู่ขนานจะทำให้การม้วน การคลาย และการตกลงของท่ออากาศรุนแรงขึ้น ไม่เพียงเท่านั้น ปัญหาเหล่านี้ยังเกิดขึ้นในเวลาเดียวกัน การสึกหรอของท่ออากาศก็รุนแรงมากขึ้น ชุดของปัญหาที่หลีกเลี่ยงไม่ได้เกิดขึ้นบ่อยครั้งในกระบวนการตระหนักถึงการดำเนินการสิ้นสุดที่ยืดหยุ่นของดิสก์แบบเคลื่อนย้ายได้ ในการผลิตจริง ไม่เพียงแต่จะกลายเป็นข้อจำกัดในมุมการหมุนของจานเคลื่อนที่เท่านั้น แต่ยังกลายเป็นข้อกังวลสำหรับลูกค้าเมื่อเลือกใช้หุ่นยนต์แบบขนานอีกด้วย จานเคลื่อนที่ที่มีทางเดินก๊าซแบบหมุนได้คือวงแหวนสลิปก๊าซแบบปิด ได้รับการพัฒนาในปี 2560 ซึ่งสามารถรับรู้ถึงการหมุนทุกมุมของจานแบบเคลื่อนย้ายได้ ในขณะเดียวกันก็รับประกันความแน่นหนาของทางเดินก๊าซ
วงแหวนกันลื่นอากาศแบบปิดจะรวมเส้นทางอากาศเข้ากับดิสก์แบบเคลื่อนย้ายได้แบบหมุนได้ ด้วยการเปลี่ยนแปลงโครงสร้างของจานเคลื่อนที่และจานหมุนที่หมุนลง ทางเดินอากาศจึงถูกรวมเข้ากับอุปกรณ์นิวแมติกส์แบบปิด ทางเดินอากาศของเพลากลางเข้าสู่ช่องอากาศบนจานคงที่ ผ่านช่องว่างที่ปิดผนึกระหว่างจานที่สามารถเคลื่อนย้ายและจานหมุนด้านล่าง และถูกส่งไปยังช่องลมบนจานหมุนด้านล่าง ในเวลาเดียวกัน ปลายบนและล่างของพื้นที่ปิดผนึกจะถูกปิดผนึกด้วย O-วงแหวนซีลรูปทรงตระหนักถึงการเชื่อมต่อของทางเดินอากาศ แก้ปัญหามุมการหมุนถูกจำกัดโดยท่ออากาศเมื่อติดตั้งดิสก์แบบเคลื่อนย้ายได้ที่มีอยู่ด้วยอุปกรณ์นิวแมติก ลดอิทธิพลของขดลวดท่อลมต่อมุมการหมุนขนาดใหญ่ ของดิสก์แบบเคลื่อนย้ายได้และเพิ่มความยืดหยุ่นของดิสก์แบบเคลื่อนย้ายได้ ในขณะที่การผลิตภาคอุตสาหกรรมยังคงก้าวไปสู่ความฉลาด เราเชื่อมั่นอย่างยิ่งว่าหุ่นยนต์คู่ขนานจะกลายเป็นบทบาทที่ขาดไม่ได้และสำคัญในการพัฒนาหุ่นยนต์อุตสาหกรรมเนื่องจากหุ่นยนต์ในระดับสูง-ความเร็วสูง-ความแม่นยำและลักษณะกระบวนการที่ยืดหยุ่น
ก่อนหน้า: ไม่มีอีกแล้ว
ต่อไป: ปฏิวัติกระบวนการจัดวางบนพาเลทของคุณด้วยการตัด-เทคโนโลยีการทำงานร่วมกันแบบ Edge
